Základní předpoklady pro dron založený na fixním křídle, který je určen pro mapování povrchu.
Co je výhodou dronů založených na fixních křídlech? Fixní křídla se objevují v různých tvarech a velikostech. Některé mohou startovat z ruky, jiné potřebují ke vzletu dlouhé a hladké startovací dráhy. Pro některé aplikace jsou vhodnější než multirotorové drony (tri-, kvadro-, hexa-, okto- koptéry). Mohou létat rychleji a hlavně déle.
Typy křídel a draků
Prvním a nejdůležitějším hlediskem pro pevné křídlo je jeho typ a konfigurace. Pevná křídla nejsou omezeny tradičním uspořádáním s motorem v předu a dvěma rovnými paralelními křídly a tradičními ocasními plochami.
Požadavky na drony pro mapování nebo na provádění průzkumných prací se liší podle potřeb, které si nezadají s malými dopravními letadly. Užitečná hmotnost, dráha, rychlost proudění vzduchu, pádová rychlost, výdrž, velikost, přenosnost a flexibilita jsou všechno faktory, které se při návrhu musí zvážit.
Pro tento typ dronu, vývojáři velmi často volí opravdu jednoduchou koncepci v podobě delta nebo šípového křídla s jedním párem křidélek. Jsou často vyrobeny z lehkého polystyrenu s několika výstuhami. Některé využívají konstrukce z uhlíkových vláken. Mívají jednu tlačnou vrtuli a nemusí se starat o podvozek, protože se spoléhají na přistání na břicho nebo pomocí padáku. Důvodem je možné poškození podvozku v drsnějších podmínkách, kde není možnost přistání na letištní dráhu.
Obvykle mívají centrální část (trup), s oddělitelnými křídly pro snadnější přepravu. Nemusí být vůbec malé. Některé mají rozpětí i 3 metry. Nicméně letové charakteristiky u křídel nejsou obvykle tak dobré jako u klasických konstrukcí letadel a nejsou určeny pro náročnější (akrobatické) lety.

Pro testování byl zvolen dron/křídlo s jednoduchým šípovým tvarem - Skywalker-X8. Skywalker je jednoduchá polystyrenová struktura s odnímatelnými křídly, které jsou vystuženy uhlíkovými tyčemi. Křídla jsou k trupu přichycena platovými příchytkami. Na horní straně má poklop pro přístup do vnitřku trupu k bateriím, elektronice a snímací technice. Rozpětí křídel je 212cm a pro start lze použít katapult, nebo startovat přímo z ruky. Při takovéto konfiguraci lze dosáhnout 40 - 60 minut letu. Při použití vyšší kapacity baterie, výkonnějšího motoru, lze zvýšit užitečné zatížení.
Požadavky na dron pevnými křídly
Při návrhu dronu jako fixní křídlo se musí zohlednit:
- Široký rozsah provozní rychlosti
- Nízká kritická rychlost
- Dlouhá výdrž
- Vysoké a stabilní užitečné zatížení
- Více režimů spuštění (ruční, katapult)
- Schopnost přistání na trup se zajištěním ochrany neseného zařízení
- Snadná a rychlá montáž a demontáž
- Snadná přeprava
Pro splnění uvedených požadavků se nejedná o lehký úkol.
Autopilot pro fixní křídlo
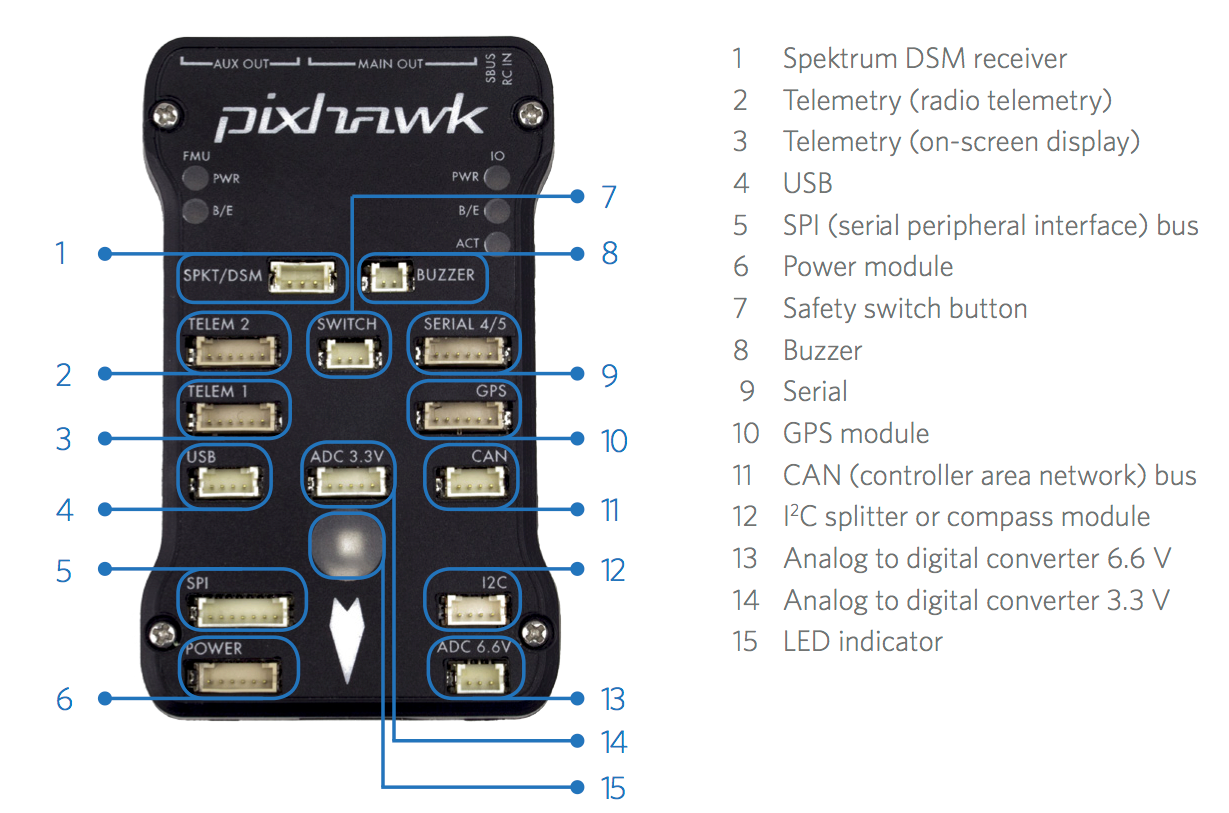
Pro autonomní letadla se využívají řídící jednotky - autopiloty. 3DR Pixhawk je jedním z nejznámějších a relativně nejlevnějších systémů pro autonomní prostředky. Jedná se o opensource a lze jej použít jak pro fixní křídla tak pro multirotory, auta, lodě a další robotické platformy. Jeho novější alternativou je PIXHAWK Mini, který je poloviční a má některé senzory výkonnější. Oba systémy lze spravovat pomocí softwaru pro konfiguraci, ale i plánování autonomních letů MissionPlanner, QGroundControl.

Další autopilot, který se hojně využívá je ArduPilot Mega. Je to další z řady opensource komponent, který je založen na platformě Arduino Mega. Uvedené autopiloti jsou často spojováni s počítačem Raspberry Pi a všichni spolupracují se softwarem pro plánování autonomních letů.
Palubní senzory a příslušenství
Pro maximální flexibilitu musí být dron schopen nést celou řadu snímačů. Lidar, termokamera, spektrální kamera, fotoaparát, kamera atd. se využívají pro poskytnutí dat pro postprodukční zpracování. Pro bezpečné nesení uvedených zařízení je nutné zajistit jejich stabilizaci pomocí gimbalu. Některé UAv to řeší tak, že v době pořízení snímku se vypnou motory, čímž se odstraní aktuální vibrace.
Důležitým senzorem pro autonomní let je GPS nebo Glonass zařízení, pro zaznamenávání GPS souřadnic. Podle souřadnic se autonomně orientuje UAV podle předem naplánované trasy. Především se usiluje o vysoce kvalitní rozlišení cca 1cm na pixel.