MicaSense RedEdge-MX poskytuje několik možností integrace – od samostatné (kde pouze napájíte senzor) až po plně přizpůsobené integrace. Pokročilé integrace využívají flexibilní rozhraní včetně Ethernetu, sériového spouštění a spouštění PWM/GPIO pro bezproblémovou integraci s jakýmkoli letadlem.
Informace o objektivu a zobrazovači
| Multispektrální | |
| Velikost pixelů | 3,75 μm |
| Rezoluce | 1280 x 960 (1,2 MP x 5 snímků) |
| Poměr stran | 4:3 |
| Velikost snímače | 4,8 mm x 3,6 mm |
| Ohnisková vzdálenost | 5,4 mm |
| Zorné pole | 47,2 stupňů horizontálně, 35,4 stupňů vertikálně |
| Výstupní bitová hloubka | 12bitový |
| GSD @ 120 m (~400 stop) | 8 cm/pixel na pásmo |
| GSD @ 60 m (~200 stop) | 4 cm/pixel na pásmo |
Středové vlnové délky a šířka pásma
Kamery se sériovým číslem RX02 nebo vyšším
| Jméno | Centrum | Šířka pásma |
| Modrý | 475 nm | 32 nm |
| Zelený | 560 nm | 27 nm |
| Červený | 668 nm | 16 nm |
| Červený okraj | 717 nm | 12 nm |
| Blízký infračervený | 842 nm | 57 nm |
Kamery se sériovým číslem RX01
| Jméno | Centrum | Šířka pásma |
| Modrý | 475 nm | 20 nm |
| Zelený | 560 nm | 20 nm |
| Červený | 668 nm | 10 nm |
| Červený okraj | 717 nm | 10 nm |
| Blízký infračervený | 840 nm | 40 nm |
Číslo a výstup snímače/pásma
| 1 | Modrý |
| 2 | Zelený |
| 3 | Červený |
| 4 | NIR |
| 5 | Červený okraj |
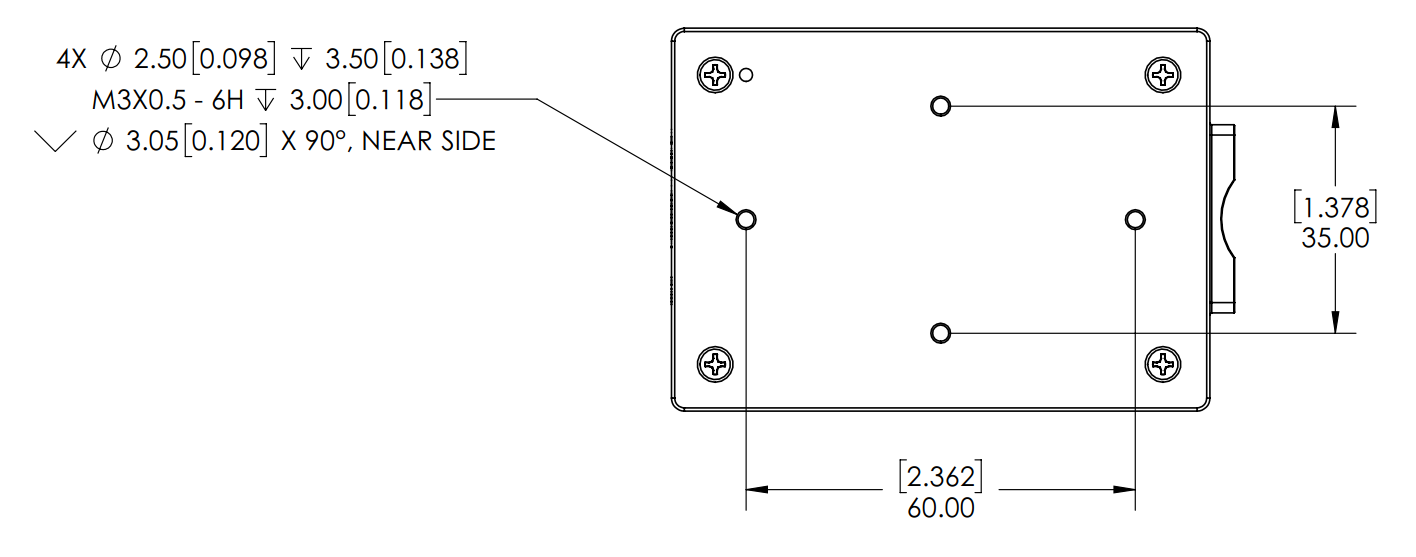
Měření a připojovací body
Ve středu jsou čtyři otvory pro šrouby M3 o rozměrech 60 mm x 35 mm. Senzor lze připevnit k hostitelskému letadlu pomocí alespoň dvou ze čtyř dodaných upevňovacích bodů se závitem a šroubů M3 x 0,5. Pokud používáte pouze dva montážní body, je důležité zvolit dva závitové body proti sobě.
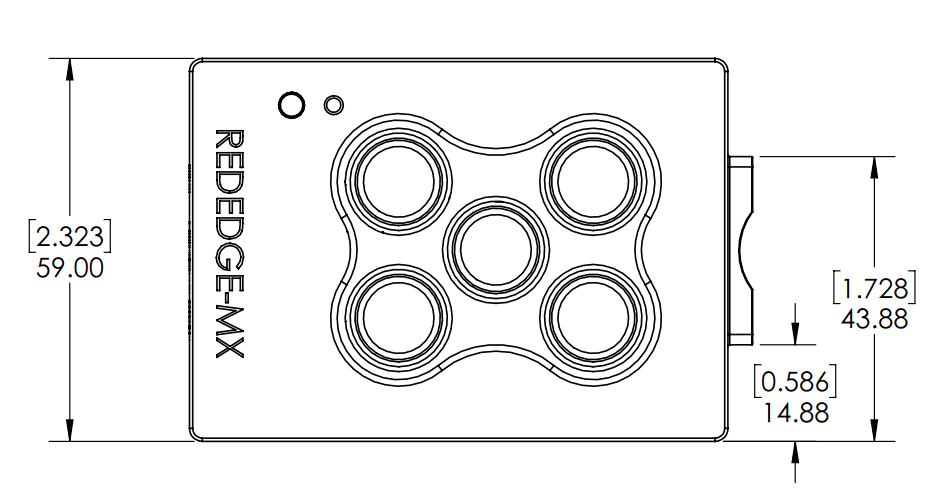
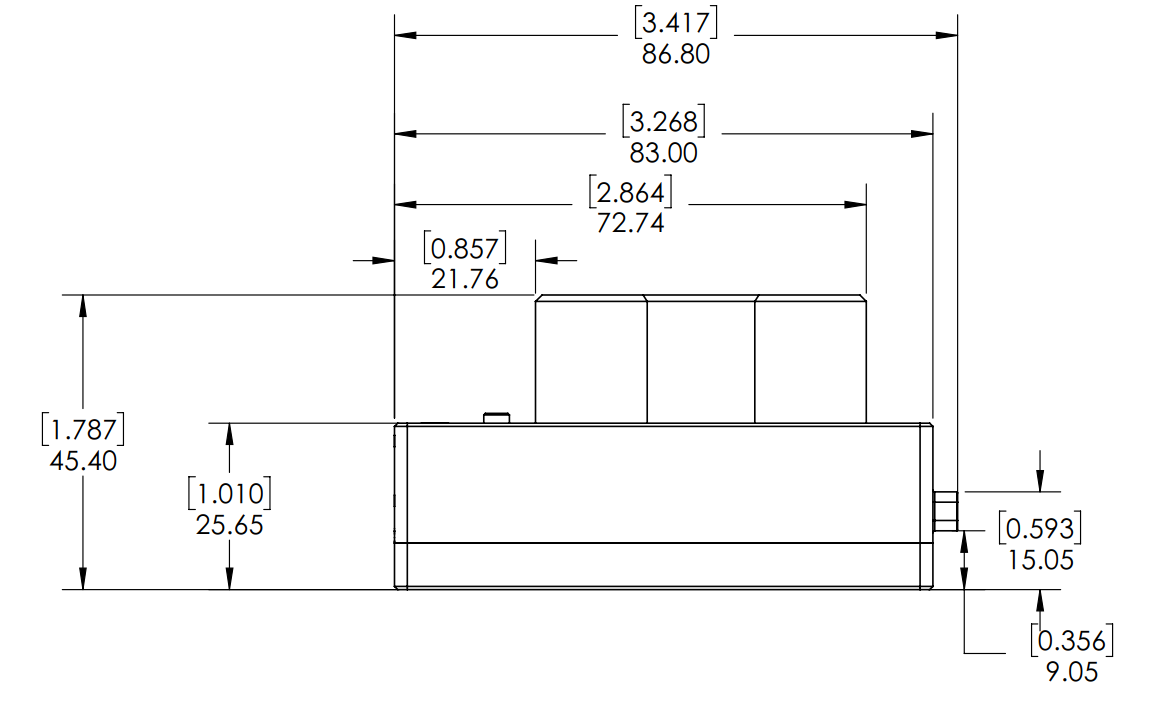
| Délka | 83 mm |
| Šířka | 59 mm |
| Výška | 45,4 mm |
| Mše | 231,9 g (fotoaparát + DLS 2) |
Doporučení pro instalaci
RedEdge-MX by měl být instalován tak, aby měl jasný výhled na oblast přímo pod letadlem. „Kužel“ čoček, který má nejširší zorné pole (47,2 stupňů horizontálně, 35,4 stupňů vertikálně), je třeba vzít v úvahu při rozhodování, kam namontovat senzor na letadle nebo nákladovém prostoru.
Multispektrální snímače jsou vybaveny globální závěrkou a dokážou odolat určitým vibracím bez snížení kvality obrazu; přesto doporučujeme izolaci vibrací mezi montážní plošinou snímače a letadlem.
Ujistěte se, že senzor směřuje přímo dolů (vzhledem k zemi) po celou dobu letu. Nejlepší způsob, jak to zajistit, je použít gimbal.
Normálně by měl být snímač orientován na šířku. Pokud plánujete namontovat senzor na výšku, nezapomeňte zaměnit vertikální a horizontální parametry v plánovači mise.
Ujistěte se, že je senzor během přistání zcela chráněn. Upozorňujeme, že během letu nedoporučujeme používat kryt objektivu, protože může filtrovat vlnové délky, které senzor měří. Místo toho chraňte snímač pomocí zapuštěné instalace nebo pomocí podvozku.
Při skladování fotoaparátu použijte dodaný kryt objektivu a nenastavujte objektiv RedEdge-MX stranou dolů, protože by na čočkách spočíval a poškrábal by je.
Další pokyny pro integraci pro DLS 2 jsou v části DLS 2 této příručky.
Možnosti konfigurace
Existuje mnoho způsobů, jak nakonfigurovat RedEdge-MX. Následující přehledy vám pomohou vybrat ten, který vyhovuje vašim potřebám.
Výchozí + režim overlap
Výchozí konfigurace používá integrovanou GPS DLS 2. Pro připojení DLS 2 ke kameře použijte dodaný kabel. Ujistěte se, že fyzická instalace DLS 2 splňuje požadavky uvedené dále v části DLS 2 této příručky. Připojte kompatibilní napájecí zdroj k napájecím kolíkům fotoaparátu. Další podrobnosti o napájení naleznete v části Vstup a výstup této příručky.
Po připojení k letadlu použijte Flight Calculator k určení potřebného procenta překrytí pro požadovanou vzdálenost vzorku země a cílovou výšku a poté zadejte parametry do nastavení Překrytí, které je uvedeno v části Spouštění v této příručce. Senzor začne snímat, jakmile bude v rámci tolerance cílové nadmořské výšky vaší cílové nadmořské výšky. Bude zachycovat dostatečně často, aby se procento překrytí udrželo v požadované výšce. To zajistí dostatečné pokrytí pro vytvoření mozaiky vaší letové oblasti s vámi preferovaným softwarem pro fotogrammetrii.
Výchozí + spouštění pomocí HTTP API

S touto konfigurací se místo automatického snímání v režimu automatického spouštění používá HTTP API (viz níže) s palubním počítačem ke spouštění kamery v intervalech určených vaším počítačem.
DLS 2 s Aircraft GPS
Pro větší kontrolu mohou pokročilí uživatelé komunikovat s RedEdge-MX pomocí HTTP (Ethernet, Wi-Fi) nebo sériového (MAVLink) pomocí MicaSense API (Application Programming Interfaces). Rozhraní API lze použít místo DLS 2 GPS k poskytování údajů o poloze a poloze (například z GPS letadla). Kdykoli jsou data GPS odeslána do senzoru prostřednictvím příkazů API, budou zapsána do metadat snímku, čímž budou na pět sekund přepsána interní data GPS DLS 2 (nebo dokud nebude odeslána další aktualizace prostřednictvím API).
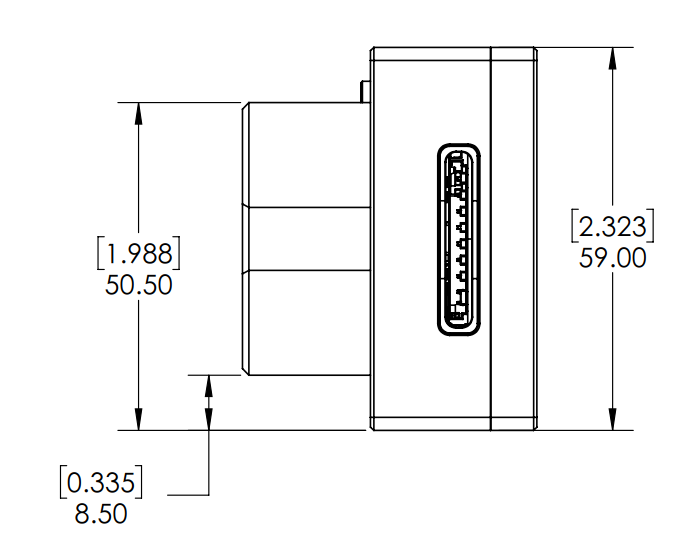
Vstupy a výstupy
Sada senzorů RedEdge-MX & DLS 2 obsahuje všechny potřebné kabely pro integraci. Při prodlužování kabelů se ujistěte, že napětí na kameře je na přijatelné úrovni, jak je uvedeno v části „Napájení“ této příručky.
Kamera RedEdge-MX obsahuje 3 konektory pro rozhraní k periferním zařízením a k hostitelskému letadlu. Čtvrtý konektor (USB typ A) se používá pro modul Wi-Fi (součástí balení).
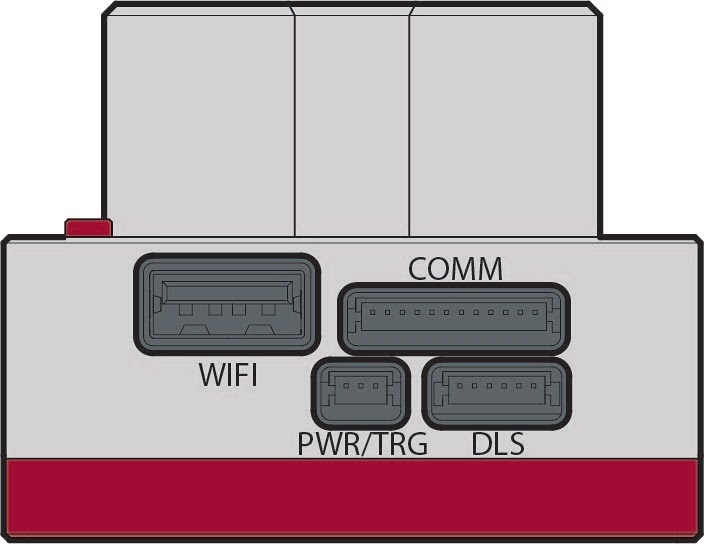
Externí napájení a externí spouštění („PWR/TRG“)
| P v # | Signál |
| 1 | Spoušť |
| 2 | Země |
| 3 | Moc |
| Konektor na fotoaparátu | Hirose DF13A-3P-1,25H(51) |
| Spojovací konektor | Doporučuje se drát Hirose DF13-3S-1.25C 28AWG |

Indikátor kolíku 1 (Δ) na řadě konektorů DF13 (zobrazeno DF13-3S-1.25C)
Vstup napájení
| Položka | Hodnota |
| Jmenovité napětí | 5,0 V DC |
| Rozsah vstupního napětí | 4,0V-15,8V DC |
| Průměrný výkon | Průměrný výkon 3,5 wattu, špičkový 8,0 W (fotoaparát nenapájí externí modul GPS) |
| Průměrný 4,0 W, špičkový 8,5 W (fotoaparát napájející externí modul GPS) |
-
Průměrná spotřeba energie RedEdge- MX integrovaného s DLS 2 je 4,0 W. Kamera však může během provozu po krátkou dobu vyžadovat okamžitý výkon až 8,0 W. Zajistěte, aby napájecí zdroj mohl během provozu spolehlivě dodávat 8,0 W a přitom zůstal v rozsahu provozního napětí. Provoz mimo specifikovaný rozsah vstupního napětí může vést k nespolehlivému provozu nebo poškození kamery.
-
RedEdge- MX obsahuje podpěťové a přepěťové ochranné obvody, které se jmenovitě používají při 3,8 V a 16,0 V. V rozsahu provozních teplot se však tato vypínací napětí mohou lišit až o 0,2 V. Pro spolehlivý provoz zajistěte, aby napájecí napětí zůstalo vždy v rozsahu provozního vstupního napětí v celém rozsahu provozních podmínek.
-
Spouštěcí vstup: Kamera může být spuštěna buď impulsem náběžné hrany, impulsem sestupné hrany nebo signálem PWM (jak se obvykle používá u standardních serv). Při použití signálu PWM jako spouště kamera detekuje přechod z „dlouhého“ PWM na „krátké“ PWM (nebo naopak v závislosti na nastavení konfigurace kamery)
| Položka | Hodnota |
| Jmenovité napětí | 3,0 V DC |
| Rozsah napětí | 0,0 V DC až 5,0 V DC |
| Absolutní maximální napětí | 5,1 V DC |
| Očekávaný rozsah spouštění PWM | 1,0 ms až 2,0 ms |
| PIN # | Signál | Směr |
| 1 | 5,0 V DC výstup | Výstup z fotoaparátu |
| 2 | DLS 2/GPS RX | Výstup z fotoaparátu |
| 3 | DLS 2/GPS TX | Vstup do kamery |
| 4 | GPS IO 0 (konfigurovatelné) | Vstup do kamery/Výstup z kamery |
| 5 | GPS IO 1 (konfigurovatelné) | Vstup do kamery/Výstup z kamery |
| 6 | Země | Země |
| Konektor na fotoaparátu | Hirose DF13A-6P-1,25H(51) | |
| Spojovací konektor | Doporučuje se drát Hirose DF13-6S-1.25C28AWG | |
Sériová a ethernetová data („COMM“) : Tento konektor je k dispozici pro těsnější integraci s hostitelským letadlem. Obsahuje standardní sériový port na úrovni TTL a také ethernetový port. Dokumentaci ke komunikačnímu protokolu získáte od společnosti MicaSense.
| PIN # | Signál | Směr |
| 1 | Serial RX (3,3 V) | Výstup z fotoaparátu |
| 2 | Serial TX (3,3 V) | Vstup do kamery |
| 3 | Sériové uzemnění | Země |
| 4 | Ethernet RX P (B+) | Výstup z fotoaparátu |
| 5 | Ethernet RX N (B-) | Výstup z fotoaparátu |
| 6 | Uzemnění linky Ethernet | Země |
| 7 | Ethernet TX P (A+) | Vstup do kamery |
| 8 | Ethernet TX N (A-) | Vstup do kamery |
| 9 | Ethernet RX P 1G (D+) | Výstup z fotoaparátu |
| 10 | Ethernet RX N 1G (D-) | Výstup z fotoaparátu |
| 11 | Ethernet TX P 1G (C+) | Vstup do kamery |
| 12 | Ethernet TX N 1G (C-) | Vstup do kamery |
| Konektor na fotoaparátu | Hirose DF13A-12P-1,25H(51) | |
| Spojovací konektor | Doporučuje se drát Hirose DF13-12S-1.25C 28AWG | |
Specifikace napájecího zdroje
| Napětí | 4 V - 15,8 V |
| Pohotovostní | 5,5 W |
| Průměrný | Průměrný výkon 3,5 W, špičkový výkon 8,0 W (fotoaparát nenapájí externí modul GPS) Průměrný výkon 4,0 W, špičkový výkon 8,5 W (fotoaparát napájející externí modul GPS) |
RedEdge-MX vyžaduje pro provoz 5 V DC s maximálním provozním napětím 15,8 V. Zdroj musí být schopen poskytnout špičkový výkon 10 W. Napájení snímače lze zajistit dvěma hlavními způsoby:
- sdílené napájení z hlavní baterie letadla
- dobíjecí lithium-iontová baterie (dvoučlánková LiPo poskytne optimální účinnost).
Ujistěte se, že zdroj napájení odpovídá výše uvedeným specifikacím a může dodávat požadované napětí na napájecím portu kamery, přičemž zohlední veškeré ztráty v kabeláži.
USB port
RedEdge-MX je vybaven USB portem, který podporuje následující Wi-Fi adaptéry Edimax:
- EW-7611ULB (vyžaduje firmware RedEdge-MX verze 7.0.0 nebo vyšší)
- EW-7811Un (V2 tohoto modelu není podporována)
Rychlost snímání
Rychlost snímání RedEdge-MX je silně závislá na úložném zařízení. Sada RedEdge-MX obsahuje 128 GB SD kartu, která má maximální rychlost snímání asi 1 sekundu na jeden záběr. Při nastavování mise nebo letového plánu upravte požadované překrytí, výšku letu a rychlost tak, aby interval zachycení nepřekročil maximální rychlost zachycení.
Automatické anímání/spouštění
RedEdge-MX podporuje tři způsoby pořizování snímků: Překrytí, Časovač a Externí spouštění.
Overlap (doporučeno)
V režimu overlap, když letadlo vystoupá na vámi zvolenou toleranci cílové nadmořské výšky pod vaši cílovou výšku, RedEdge-MX začne zachycovat a zachytí pouze tehdy, pokud uletělo dostatečnou vzdálenost, aby bylo zajištěno procento překrytí, které jste zadali. Před vydáním firmwaru RedEdge-MX 7.1.0 byla tolerance cílové nadmořské výšky pevně nastavena na 50 metrů, ale nyní ji může určit uživatel. Když je nadmořská výška senzoru pod Tolerance cílové nadmořské výšky z cílové nadmořské výšky, senzor přestane snímat. Režim překrytí vypočítává pouze překrytí vpřed a nemůže zohlednit boční překrytí, které je nutné vypočítat v plánovači letu pomocí zorného pole snímače k vytvoření vhodného rozestupu řádků.
Tento režim doporučujeme, protože pomáhá zajistit správné překrytí (75 % nebo vyšší), což je nezbytné pro dosažení vysoce kvalitního výstupu při zpracování dat ve standardním softwaru pro fotogrammetrii.
Časovač
V režimu časovače bude RedEdge-MX snímat podle periody časovače, která je ve výchozím nastavení každé dvě sekundy. Pokud je perioda časovače nastavena tak, aby zachycovala rychleji, než může úložné zařízení zapisovat, může dojít k nekonzistentním intervalům zachytávání. Rychlost zachycení je silně závislá na rychlosti zápisu připojeného paměťového zařízení a je náchylná k nespolehlivému fyzickému rozestupu zachycení, pokud letadlo neletí konstantní rychlostí vůči zemi. Další podrobnosti najdete v této příručce pod nadpisy Úložiště USB a Ethernet a rychlost zachycování.
Externí spouštění
Pro větší kontrolu můžete povolit režim externího spouštění pro komunikaci s RedEdge-MX pomocí PWM nebo spouštění okrajem. Tento dokument obsahuje podrobné informace o pinech.
Externí spoušť
Senzor lze nastavit tak, aby se spouštěl vzestupnou hranou pulzu, sestupnou hranou pulzu nebo signálem PWM (jak se obvykle používá u standardních serv). Při použití signálu PWM jako spouštěče detekuje senzor přechod z „dlouhého“ PWM na „krátký“ PWM (nebo naopak). Při použití PWM, náběžné nebo klesající hrany se ujistěte, že zem vstupního signálu je připojena k izolovanému zemnícímu kolíku na kameře.
HTTP API (Ethernet a Wi-Fi)
HTTP API je nejvýkonnější způsob propojení s RedEdge-MX. Toto API můžete použít buď pomocí ethernetového konektoru, nebo pomocí přístupového bodu Wi-Fi kamery.
K API se přistupuje přes HTTP připojení k portu 80 na IP adrese senzoru. Většina dat se vyměňuje ve formátu JSON.
Skutečná hodnota IP adresy závisí na konfiguraci. Při přístupu k senzoru přes jeho Wi-Fi přístupový bod bude IP adresa senzoru 192.168.10.254. Když je senzor připojen k síti Ethernet, IP adresa senzoru bude standardně 192.168.1.83.
Senzoru lze přikázat, aby provedl zachycení, buď požadavkem GET nebo POST na adresu URL /capture.
Více informací naleznete na https://www.micasense.com/api
Sériové API
Serial API poskytuje rozhraní MAVLink pro RedEdge-MX. Toto API můžete použít připojením vašeho systému s podporou MAVLink k hostitelskému sériovému portu na senzoru.
K API se přistupuje prostřednictvím sériových zpráv ve formátu MAVLink. MAVLink poskytuje otevřený datový formát pro interakci a také sadu nástrojů, které pomáhají programátorovi při vývoji a testování rozhraní. RedEdge-MX používá zprávy MAVLink v1.0 a komunikuje s hostitelem rychlostí 57 600 baudů.
Další informace a příklady naleznete na https://www.micasense.com/api
Disabled
„Disable“ by mělo být nastaveno při spouštění přes Skyport (PSDK), HTTP API nebo sériové (MAVLink) API. Tento režim deaktivuje funkce automatického spouštění kamery a bude vyžadovat spouštěcí příkazy přímo z dronu prostřednictvím PSDK, HTTP nebo MAVLink, v závislosti na integraci.
Downwelling Light Sensor 2 (DLS 2)
Downwelling Light Sensor (DLS 2) je pokročilý senzor dopadajícího světla, který se připojuje přímo k RedEdge-MX. Během mise měří DLS 2 okolní světlo a úhel slunce a zaznamenává tyto informace do metadat snímků TIFF pořízených kamerou. Tyto informace pak mohou být použity specializovanými nástroji pro zpracování (jako je Pix4Dmapper) ke korekci globálních změn osvětlení uprostřed letu, jako jsou ty, ke kterým může dojít v důsledku mraků zakrývajících slunce.
Kromě toho DLS 2 poskytuje data GPS společnosti RedEdge-MX, pokud nejsou data GPS poskytována z externího zdroje, jak je uvedeno výše v této příručce. Pokud používáte alternativní zdroj GPS, přijímač GPS zůstane zapnutý s nízkou spotřebou energie.
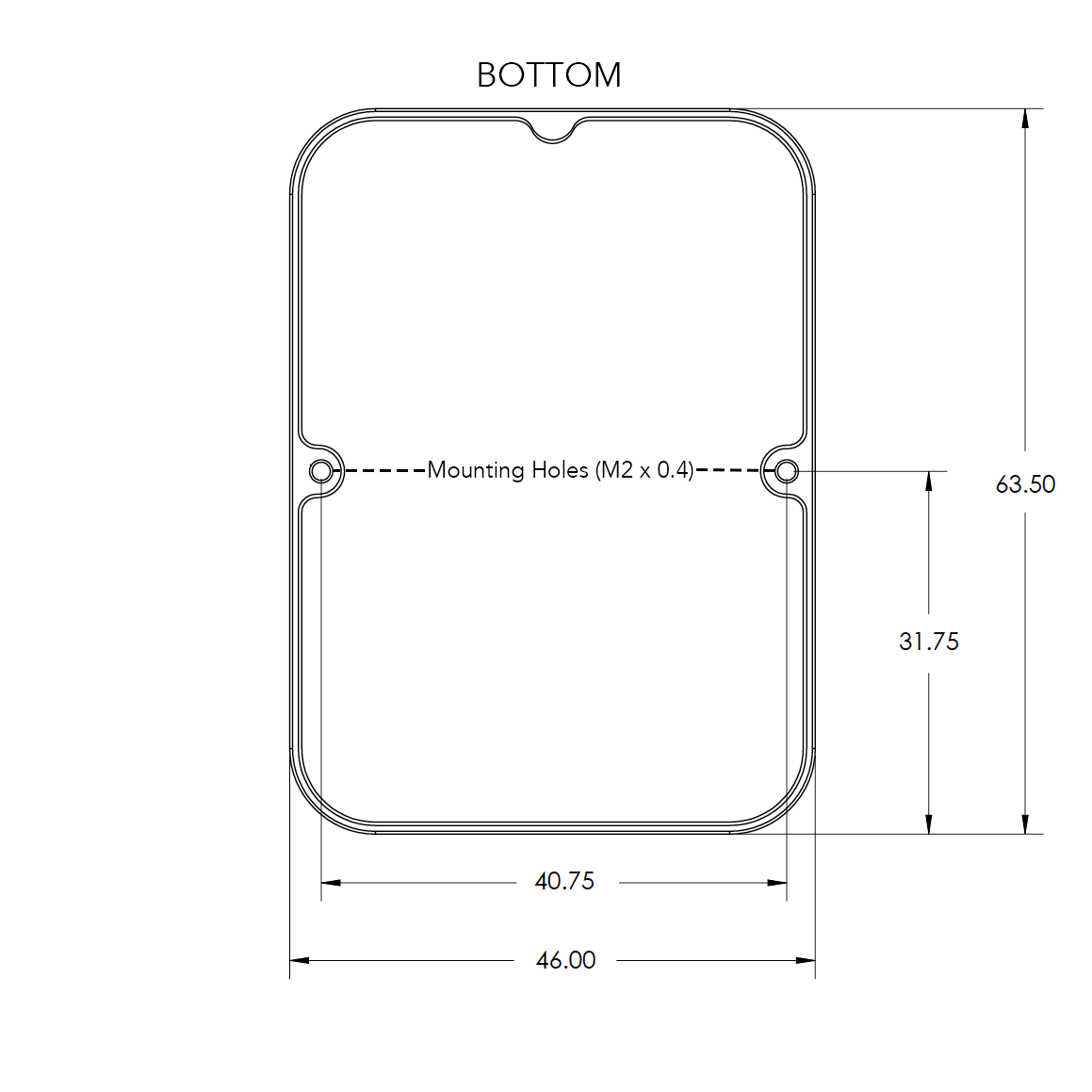
Rozměry a montážní otvory
|
Výška |
14,03 mm |
|
Šířka |
46,00 mm |
|
Délka |
63,50 mm |
|
Hmotnost |
49 g |
DLS 2 konektory a tlačítka
Sada senzorů obsahuje všechny potřebné propojovací kabely pro připojení k DLS 2.
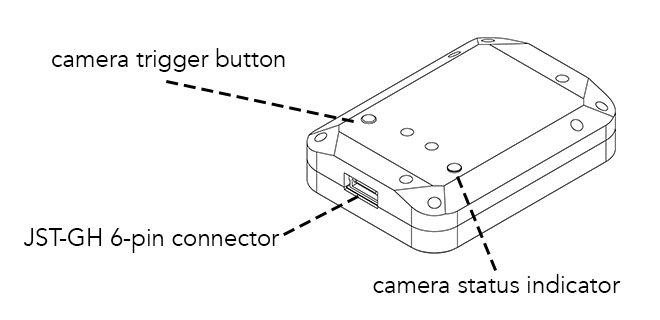
LED indikátor stavu kamery napodobuje LED signály na RedEdge-MX. Tlačítko spouště fotoaparátu vydá příkaz k zachycení na RedEdge-MX. To je užitečné pro zachycení předletového snímku kalibračního panelu, ale je třeba dávat pozor, abyste při stisknutí tlačítka nezakryli nebo nezastínili žádný ze světelných senzorů.
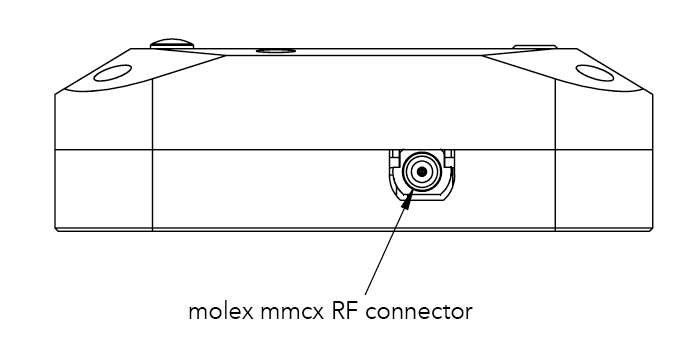
Starší DLS 2 mají RF konektor. Tento konektor nepoužívá DLS 2 ani kamera.
Pokyny k instalaci DLS 2
DLS 2 by měl být vždy nejvyšším objektem v letadle, aby se zabránilo stínům nebo odrazům. Obsahuje integrovaný GPS senzor, který lze využít pro geotagging snímků RedEdge-MX, pokud nejsou systémové signály GPS poskytovány senzoru jinými prostředky. Nainstalujte modul tam, kde bude mít jasný výhled na oblohu, daleko od všech zařízení, která by mohla rušit signály GPS (jako je datové spojení nebo video vysílače).
Když se DLS 2 spustí, pokusí se o kalibraci, což vyžaduje, aby byl nehybný a nehybný. Ujistěte se, že nedochází k vibracím nebo pohybu, dokud DLS 2 nedokončí tento postup, což je indikováno normálními stavovými kontrolkami LED.
POZNÁMKA 6kolíkový konektor na DLS 2 by měl směřovat dopředu ve směru letu. Montáž v opačném směru způsobí, že proces kalibrace magnetometru bude pozpátku, ale jinak bude stále fungovat.<
Pevné křídlo
Vždy instalujte DLS 2 do nejvyššího bodu trupu (je-li to možné), abyste zabránili jakémukoli stínu nebo odrazům od trupu letadla, ocasní plochy nebo vrtulí.
Nezapouštějte ani nevkládejte tělo senzoru DLS 2 pod kovovou základnu.
Místní odrazy by mohly ovlivnit měření světelným senzorem. V blízkosti světelného senzoru DLS 2 se vyvarujte světlé nebo kovové barvy, protože to může rušit hodnoty příchozího světla.
Multirotor
Nainstalujte DLS 2 na pevný sloupek tak, aby byl nejvyšším předmětem v letadle.
Ujistěte se, že v zorném poli DLS 2 nejsou žádné překážky, včetně vrtulí a dalších předmětů na letadle.
Udržujte DLS 2 v dostatečné vzdálenosti od GPS letadla. Instalace DLS 2 v blízkosti GPS letadla může ovlivnit příjem GPS letadla.