K navázání spojení se senzorem pomocí Wi-Fi nebo Ethernetu lze použít jakékoli zařízení (jako je počítač, tablet nebo smartphone).
Wi-Fi připojení
Po zapnutí senzoru a dokončení inicializace bude vysílat signál Wi-Fi (pokud je připojen adaptér Wi-Fi). SSID obsahuje název senzoru a sériové číslo. Sériové číslo je vytištěno na zadní straně snímače.
Heslo pro tento přístupový bod Wi-Fi je micasense.
Po připojení k Wi-Fi senzoru otevřete libovolný webový prohlížeč a přejděte na webovou stránku senzoru zadáním „192.168.10.254“ do adresního řádku prohlížeče (bez uvozovek).
Připojení Ethernet
Ke snímači je možné se připojit přes Ethernet. Nejprve budete potřebovat kabel nebo adaptér, který připojí ethernetový kabel k příslušnému portu na senzoru (podrobnosti najdete v příručce pro integraci vašeho senzoru).
Je vyžadována ruční konfigurace TCP/IP. Nastavte Ethernet hostitelského počítače tak, aby používal manuální IP adresu v bloku 192.168.1.0-255. Doporučujeme IP adresu 192.168.1.40, pokud se ještě nepoužívá. Nastavte masku podsítě hostitelského počítače na 255.255.255.0.
Jakmile je síť Ethernet hostitelského počítače nakonfigurována, připojte se ke konfigurační stránce pomocí adresy IP sítě Ethernet (ve výchozím nastavení 192.168.1.83). IP adresu lze změnit v Nastavení > Pokročilé > Konfigurace Ethernetu.
Přehled webové konfigurační stránky
Senzor má 4 hlavní „stránky“:
|
|
Domovská stránka |
|
|
Stránka živého náhledu |
|
|
Titulní stránka |
|
|
Stránka nastavení |
Domovská stránka
Poskytuje informace o stavu senzoru a přijímače GPS, který je k němu připojen.
Čas poskytuje připojené GPS zařízení. Pokud není nalezen žádný GPS, čas se zobrazí jako čas UNIX (1. ledna 1970). Pokud a když senzor detekuje GPS, automaticky aktualizuje čas.
„Capture Config“ zobrazuje aktuální nastavení automatického spouštění (překrytí, časovač, externí spouštění nebo zakázáno).
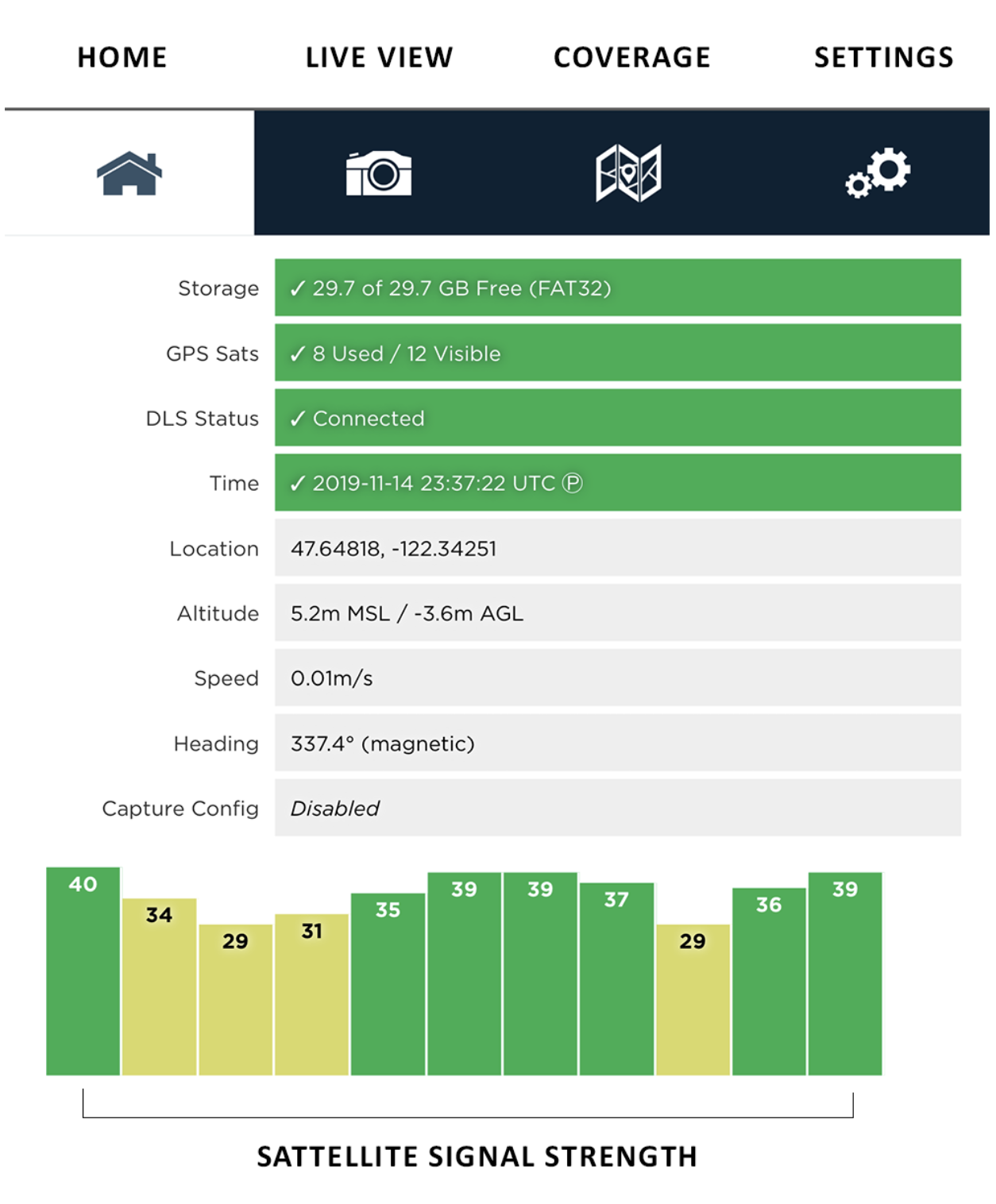
Úložiště: Toto bude hlásit váš dostupný a maximální úložný prostor a také systém souborů (např. FAT32).
GPS satelity: Udává množství satelitů, které jsou detekovány a aktuálně používány. V dolní části stránky je také oblast, která ukazuje sílu signálu detekovaných satelitů.
Stav DLS: Svítí zeleně, pokud je DLS napájeno a komunikuje s kamerou.
Čas: Zpočátku bude nastaven na čas UNIX (1970-01-01 00:00:00 UTC). Jakmile má GPS zámek, aktualizuje se na aktuální datum/čas v UTC (Universal Time). Nelze jej změnit na jiné časové pásmo, protože mnoho programů pro zpracování dat spoléhá na UTC pro přesné výpočty.
Poloha: Toto je detekovaná poloha pocházející z GPS, zapsaná v desetinných stupních.
Nadmořská výška: Udává vaši aktuální nadmořskou výšku v Mean Seal Level (MSL) a Above Ground Level (AGL).
Nadmořská výška AGL hlášená na stavové stránce je odhad na základě počátečního zámku GPS přijatého kamerou. Pokud počáteční zámek GPS není příliš přesný, je možné, že hlášená AGL bude výrazně vypnutá, zvláště když se časem vytvoří lepší zámek GPS. Vypnutím a opětovným zapnutím kamery se resetuje odhad země.
Rychlost: Aktuální rychlost zjištěná v metrech za sekundu. Tyto jednotky měření nelze v tuto chvíli převést.
Kurz: Váš aktuální magnetický kurz. Pokud je správně zkalibrován, můžete měření zkontrolovat pomocí ručního kompasu a ověřit jeho přesnost. Doporučujeme kompas pravidelně překalibrovat, ale minimálně při jeho přemístění na jiné místo v letadle, nebo pokud letíte v jiném časovém pásmu (což by mírně změnilo magnetický kurz).
Capture Config: Zde se zobrazí vaše aktuální nastavení pro režim automatického spouštění.
Stránka živého náhledu
Poskytuje živý náhled snímků pořízených snímačem.
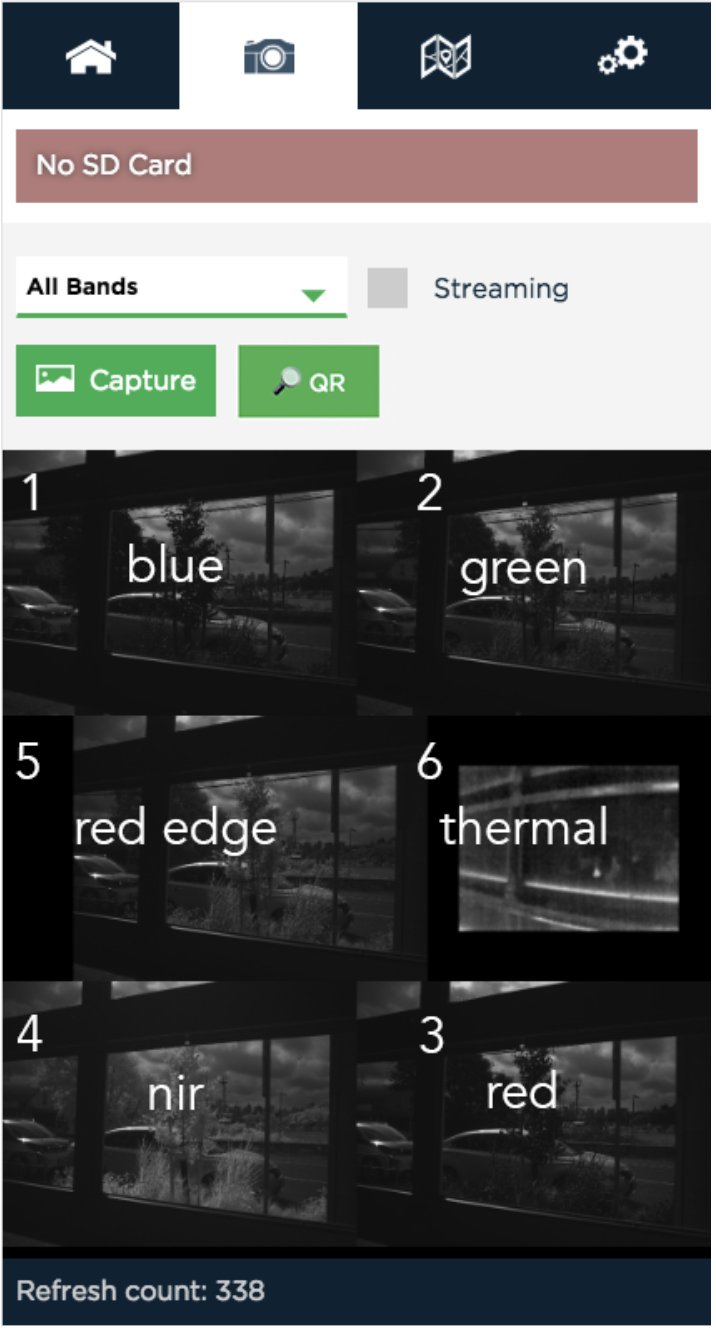
Kdykoli snímač pořídí snímky ručně (pomocí fyzického tlačítka nebo webového tlačítka), vybraný snímek (snímky) se zobrazí na stránce živého náhledu na základě nastavení rozbalovací nabídky „Band“. Místo zobrazení „All Bands“ můžete zvolit zobrazení jednotlivých čísel pásem, která jsou vyznačena na obrázku výše. Celkový počet pásem dostupných pro zobrazení závisí na senzoru.
Capture
Tlačítko snímání vynutí snímání pro snímač a je ekvivalentní stisknutí tlačítka ručního spouštění na snímači.
QR
Tlačítko QR spustí režim automatické detekce panelu. V tomto režimu snímač zobrazuje živý náhled, aktualizovaný přibližně dvakrát za sekundu. Konfigurační stránka a senzory s interními reproduktory budou přehrávat zvuk, dokud senzor nedetekuje odrazový panel MicaSense a QR kód. Jakmile je detekován, senzor automaticky spustí zachycení panelu a opustí režim. Chcete-li ukončit režim automatické detekce panelu, stiskněte tlačítko „Stop“.
Streamování
Zaškrtávací políčko Streaming se používá pro náhled snímků ze snímače v téměř reálném čase. Když je zapnutý režim streamování, zobrazené snímky se aktualizují tak rychle, jak to snímač může podporovat (přibližně dvakrát za sekundu). „Počet obnovení“ ukazuje, kolikrát byl displej aktualizován. Všimněte si, že režim streamování neukládá žádné obrázky na paměťové zařízení. Umožňuje pouze rychlé zachycení snímače pouze pro účely náhledu. Režim streamování funguje nejlépe při připojení k senzoru přes Ethernet.
Vezměte prosím na vědomí, že pokud používáte systém s více kamerami, jako je RedEdge-MX Dual Camera System, tento režim streamování nebude dostupný.
POZNÁMKARežim streamování je určen pro živý náhled. Před zahájením jakýchkoli dalších operací (zejména před zapnutím režimu automatického snímání nebo létání) vypněte režim streamování.
Expozice (pokročilé)
Pokud byla na stránce Nastavení povolena ruční expozice , nastavení expozice se zobrazí v horní části stránky živého náhledu . Pro každé pásmo snímače je k dispozici nastavení expozice. Tato nastavení budou platit pro každý snímek pořízený snímačem, dokud je nezměníte nebo deaktivujete.
POZNÁMKA Toto je pokročilá možnost operace a normálně by měla být deaktivována. Ve výchozím nastavení snímač automaticky upravuje zisk a expozici.
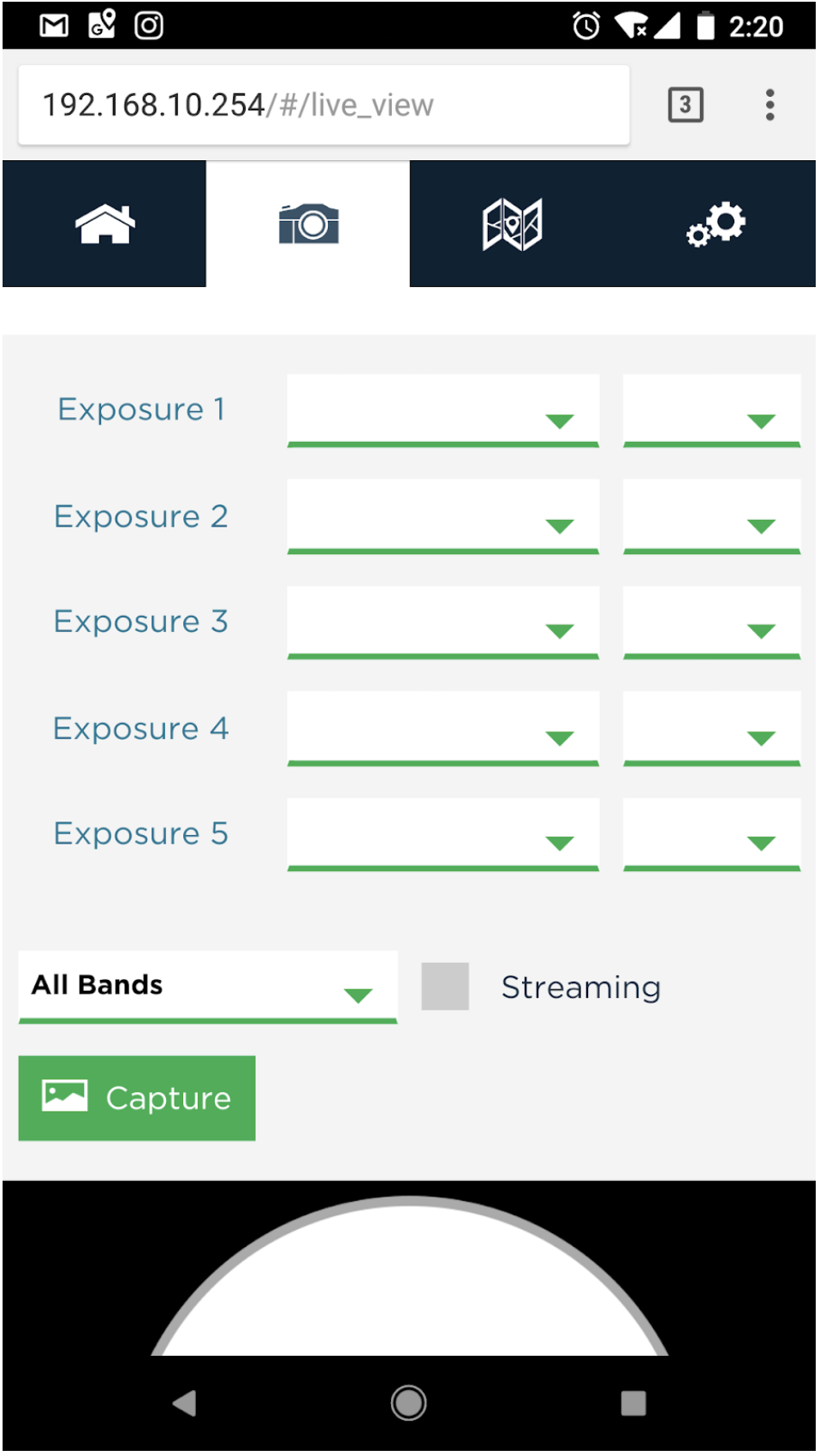
Možnosti
První možnost ovládá délku expozice. Pohybuje se od 0,066 ms do 24,5 ms a udává dobu, po kterou je globální závěrka „otevřená“ a zaznamenává světlo.
Druhá možnost ovládá zesílení, které udává, jak moc se má zesílit příchozí signál. Dostupné hodnoty jsou 1x, 2x, 4x a 8x. Původní hodnoty pixelů se vynásobí vybranou možností.
API
Tato nastavení lze konfigurovat dynamicky pomocí MicaSense API. Podrobnosti najdete v sekci expozice v dokumentaci API: https://micasense.github.io/rededge-api/
Coverage Page
Stránka pokrytí poskytuje informace o zeměpisné poloze, kde byly snímky na paměťovém zařízení pořízeny na základě informací z modulu GPS. Tato stránka také obsahuje kalkulačku pro odhad parametrů pro plánování mise.

Stáhněte si KMZ
Kliknutím na odkaz „captures.kmz“ senzor vygeneruje soubor KMZ, který stáhne váš prohlížeč. Soubor KMZ obsahuje zeměpisnou šířku/délku/výšku všech zachycených snímků v úložném zařízení a lze jej použít k ověření pokrytí po letu nebo sérii letů. Soubor KMZ lze otevřít pomocí aplikace GIS (jako je QGIS nebo Google Earth)
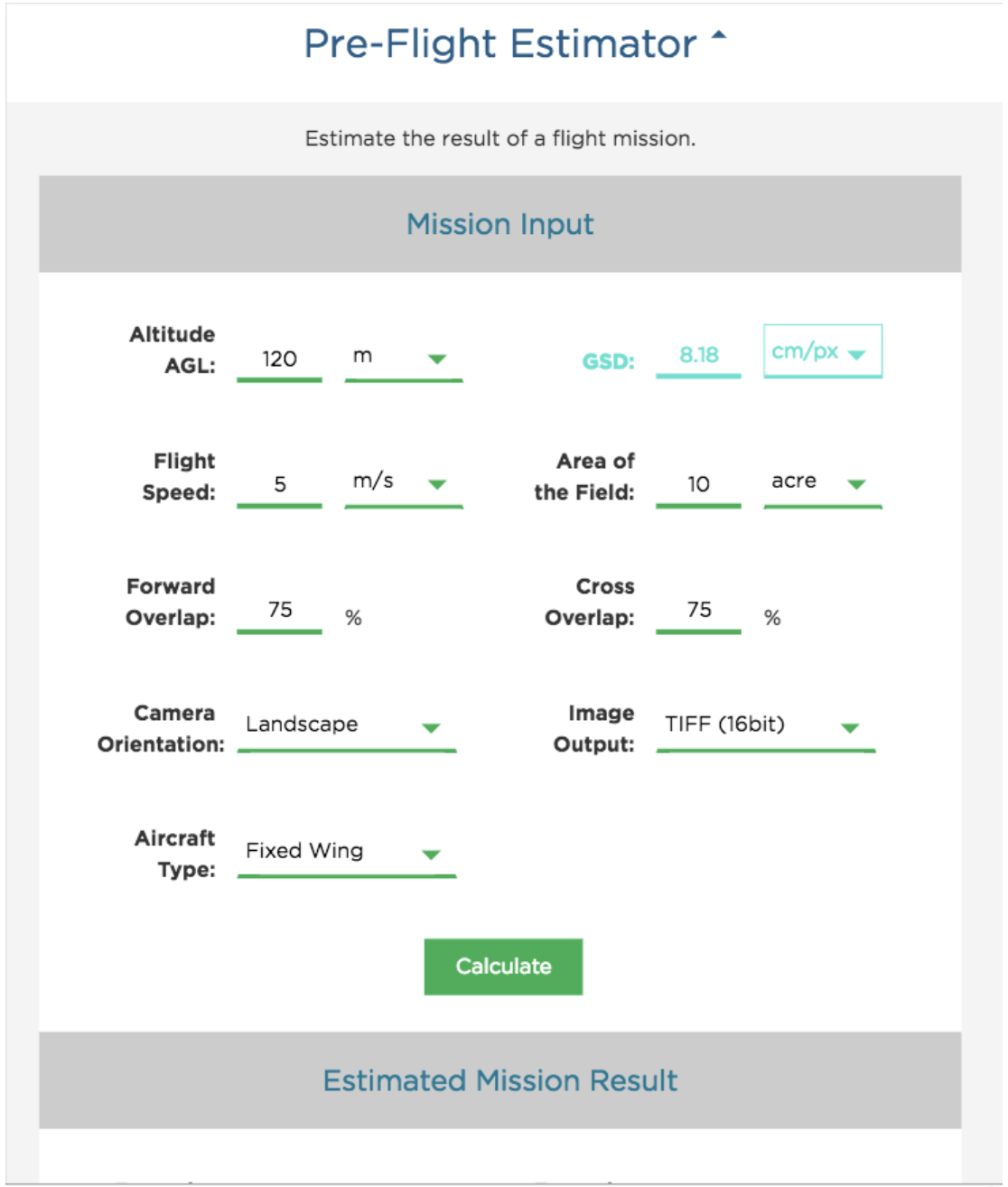
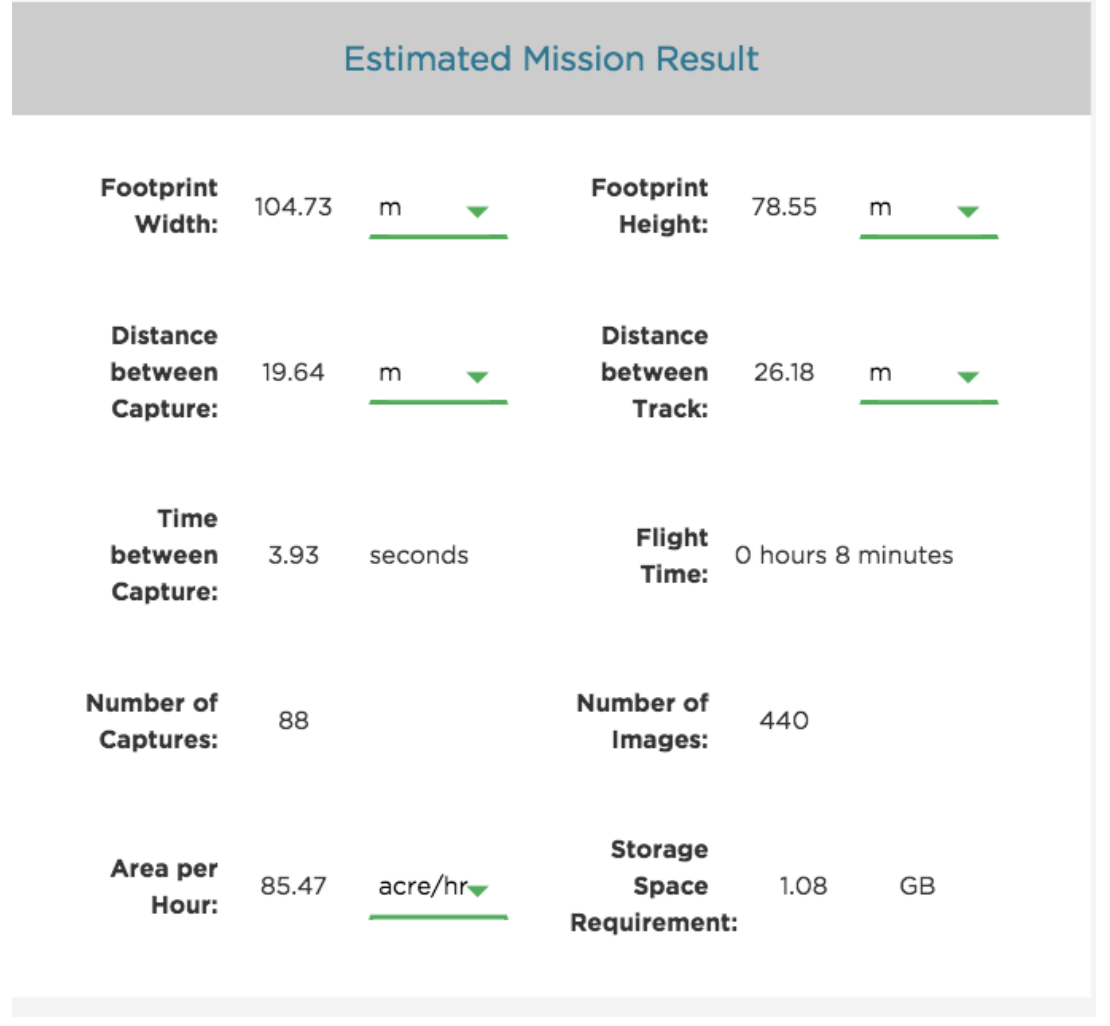
Předletový odhad
Pre-flight Estimator je kalkulačka, která dokáže odhadnout výsledky letové mise. Zadejte parametry mise a stiskněte tlačítko „vypočítat“, abyste viděli výsledky níže.
Odhad pokrytí
Coverage Estimator je nástroj pro rychlou kontrolu, zda má let dostatečný přesah. Na úvodní stránce pokrytí vyberte jednu nebo více sad obrázků, které chcete odhadnout, a klikněte na „Další“ (poznámka: sady obrázků musí být geograficky blízko, aby fungovaly správně).
Měla by se objevit karta Úprava letu a zobrazit souhrn aktuálních nastavení odhadu. Orientace senzoru udává směrovost senzoru vzhledem k letadlu, jak je znázorněno níže.
Letová AGL se odhaduje na základě GPS pozic zaznamenaných pro snímky s předpokladem, že snímky z kalibračního panelu byly pořízeny blízko země, ale pokud je odhad nesprávný, můžete ručně zadat správnou AGL.
Rozlišení odhadu nastavuje kvalitu výstupní mapy. Nízká je dostatečná pro většinu aplikací.
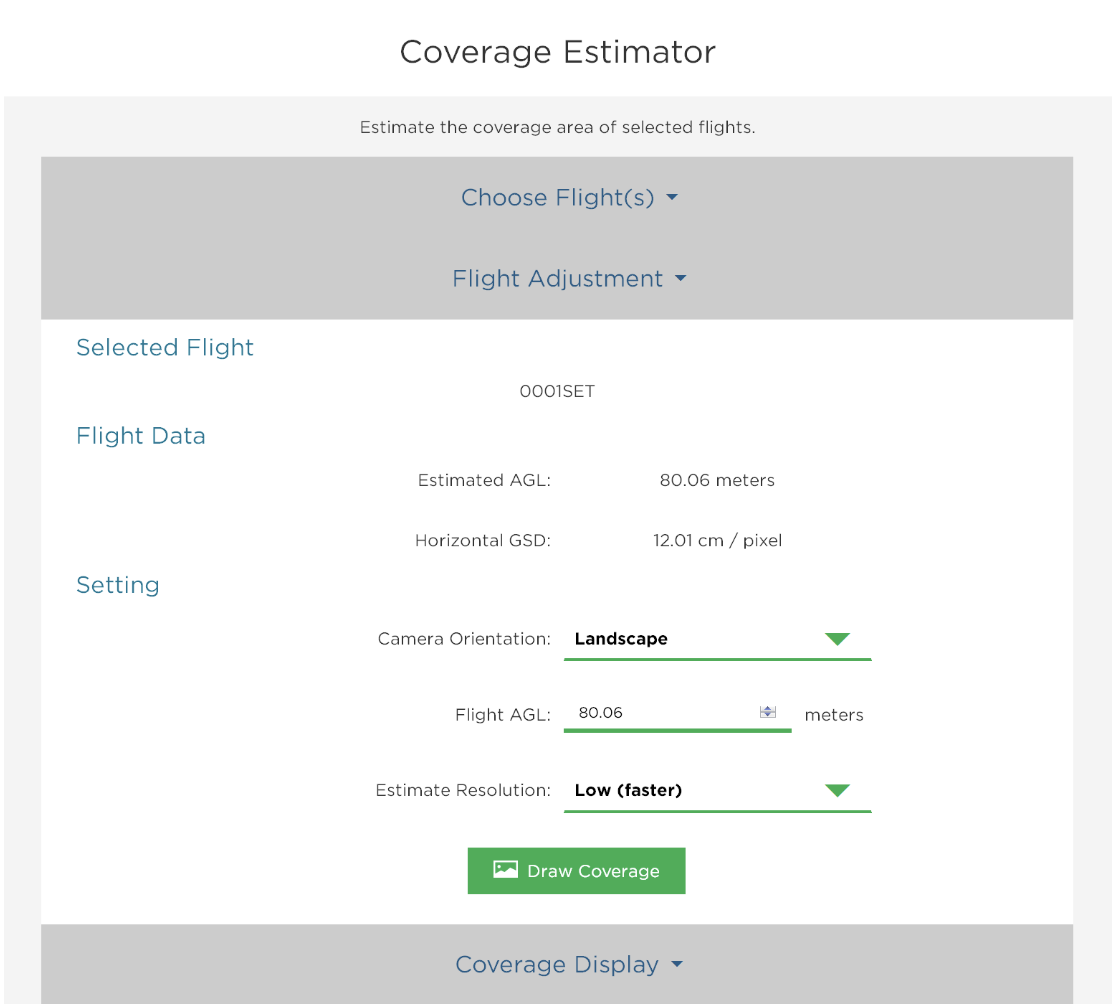
Kliknutím na „Nakreslit pokrytí“ se zobrazí odhad pokrytí. Doba vykreslování závisí na CPU vašeho zařízení, velikosti pole, počtu snímků, letu AGL a nastavení kvality, ale na moderním smartphonu obvykle běží za méně než 30 sekund.
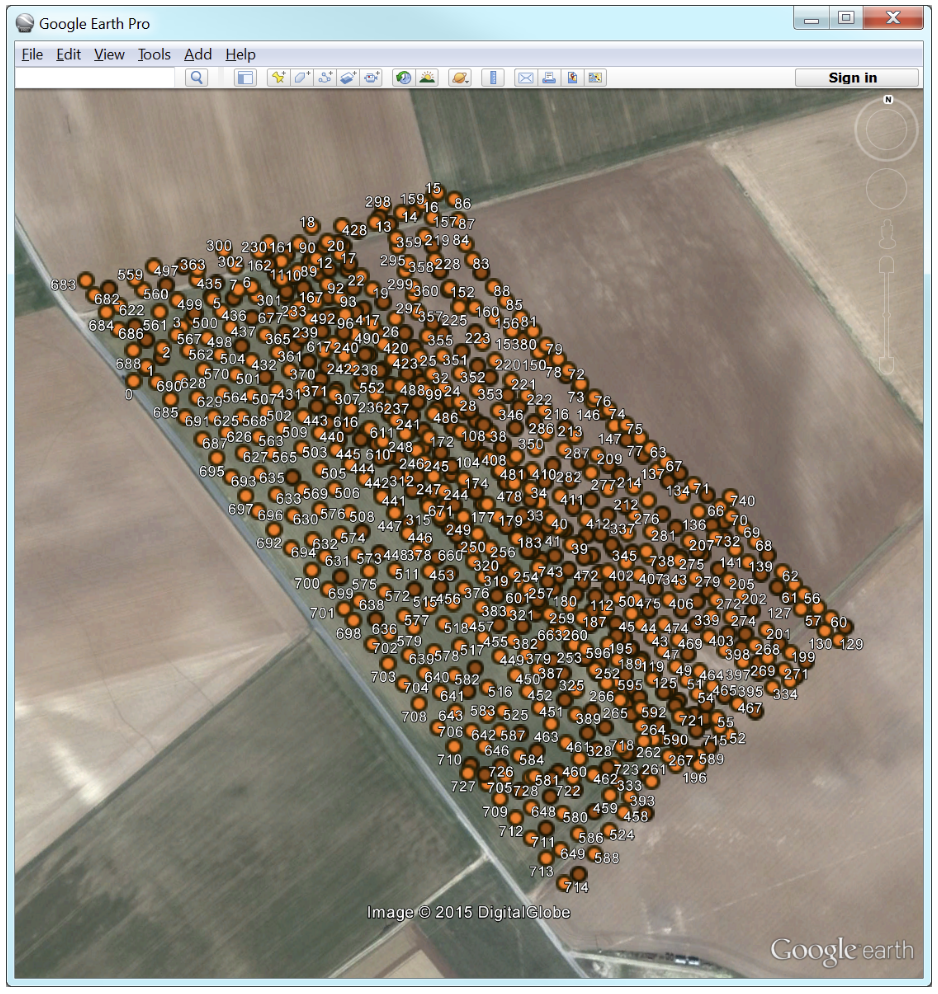
Nakonec vám bude předložen odhad vašeho pokrytí. Toto je barevné schéma vhodné pro barvoslepé.
Tmavě modré oblasti mají vysokou pravděpodobnost správného zpracování v softwaru pro fotogrammetrii, jako je Pix4D. Oblasti, které jsou oranžové, mohou fungovat, ale pravděpodobně ne. Červené oblasti se téměř jistě nezpracují správně. Okraje kolem pole se obvykle zobrazí jako červené nebo oranžové. To je v pořádku, pokud jsou všechna data, která se snažíte shromáždit, obsažena v tmavě modré oblasti.
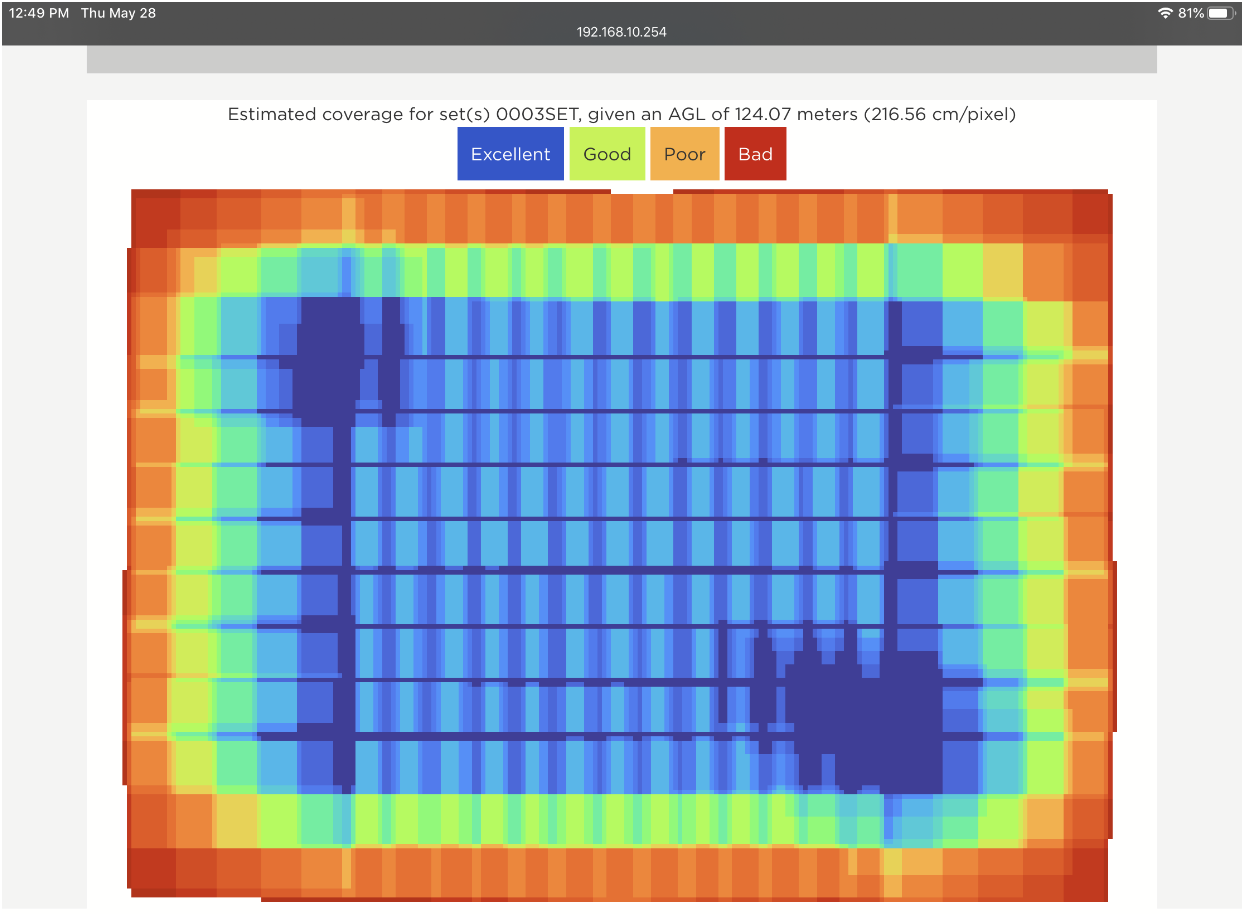
Příklad dobrého pokrytí pole (výše)
Pokud zjistíte, že váš odhad pokrytí pole ukazuje slabé pokrytí, dvakrát zkontrolujte, zda je správně nastaveno Flight AGL. Pokud je Flight AGL nesprávné, klikněte zpět na sekci Flight Adjustment, opravte Flight AGL a poté znovu klikněte na „Draw Coverage“. Pokud je letová AGL správná, vaše nastavení překrytí může být chybné. Budete muset pořídit více snímků pole, abyste zajistili, že následné zpracování bude úspěšné.
Nejčastější příčinou nesprávného překrytí je, že parametry snímače nebyly zadány do softwaru pro plánování letu pro použití při výpočtu vzdáleností tratí. Parametry senzoru, které by měly být použity při plánování letu, najdete v naší znalostní databázi nebo v průvodci integrací vašeho senzoru. Správnost rozestupu stop můžete také potvrdit porovnáním s hodnotami danými nástrojem Pre-Flight Estimator snímače („Vzdálenost mezi zachycením“ je vzdálenost překrytí vpřed a „Vzdálenost mezi stopami“ je vzdálenost bočního překrytí).