Od uvedení Mavic 3, který zaujal pozici nejnovějšího a největšího dronu od DJI, uplynulo spousta měsíců. Společnost DJI ještě nevydala kompatibilní mobilní SDK (sada pro vývoj softwaru), která by umožnila ovládání dronu aplikacemi třetích stran. Neznamená to žádné aplikace třetích stran – žádné automatické plánovače letů pro konzistentní fotogrammetrické lety. Některé v současnosti dostupné funkce však mohou pomoci využít dron pro fotogrammetrii při čekání na SDK.
Režim Cine Flight na Mavicu 3
Mavic 3 má fyzický přepínač pro přepínání mezi letovými režimy – Cine, Normal a Sport. Režim Cine omezuje maximální rychlost na 5 metrů za sekundu. Tato rychlost je náhodou velmi vhodná pro fotogrammetrické skenování ve středních a vysokých nadmořských výškách. Jak již název napovídá, model je zde proto, aby zajistil filmové záběry s plynulým pohybem dronu s tlumeným ovládáním. Tento režim využijeme pro účely fotogrammetrie. Aby však tento režim plně nahradil režim stativu, který byl dostupný na dřívějších dronech a stal se ještě užitečnějším pro fotogrammetrii, potřebujeme drobnou doplňkovou funkci – uživatelsky definovaný rychlostní limit. Vypadá to jako triviální funkce, která by mohla být přidána aktualizací softwaru. Z nějakého ohromujícího důvodu tato funkce zatím není k dispozici.

Letové režimy na ovladači DJI RC-N1
Časové snímání
Časované snímání je způsob, jak DJI nazývá intervalometr/časosběrné snímání v nabídce aplikace Fly. Při fotografování v tomto režimu je snímek pořízen každých X sekund. Aplikace umožňuje spodní limit 2 sekund. 2 sekundy jsou dostatečně rychlé pro využití časovaného snímání pro fotogrammetrické skenování z výšky přibližně 40 metrů a výše. V asi 50 metrové výšce letu získáme asi 80 procent sekvenčního překrytí při letu maximální rychlostí v režimu filmu. Jak se dostáváme výše, můžeme se buď vypořádat se zvýšeným přesahem, který je málokdy na škodu, nebo prodloužit interval na 3 sekundy.

Časovaný snímek v aplikaci DJI Fly
Hyperlapse režim Mavic 3
Režim Hyperlapse je v podstatě režim časovaného fotografování s předem naprogramovanou trasou – tak blízko letovým plánům na trase, jak jsme v tuto chvíli schopni. Proč tedy nevyužít funkci hyperlapse? Dva hlavní důvody: nemůžete změnit intervalový časovač jako u režimu časovaného fotografování; v podstatě byste dělali stejnou práci dvakrát. Musíte proletět body na trase ručně a nastavit je tak, abyste naprogramovali trasu letu. To spotřebovává více baterie, než je nutné, a prodlužuje dobu potřebnou pro skenování. Tyto dva důvody samy o sobě způsobují, že režim hyperlapse je horší než technika, kterou používáme v našem případě.
Pravidlo třetin překrytí
Dalším jednoduchým, ale nezbytným nástrojem pro úspěšné ruční skenování je mřížka třetin překrytá na živém přenosu kamery. Pomocí této mřížky můžeme zajistit dostatečný boční přesah. Také pomáhá s celkovou kompozicí a orientací dronu. Překrytí lze povolit v nastavení.
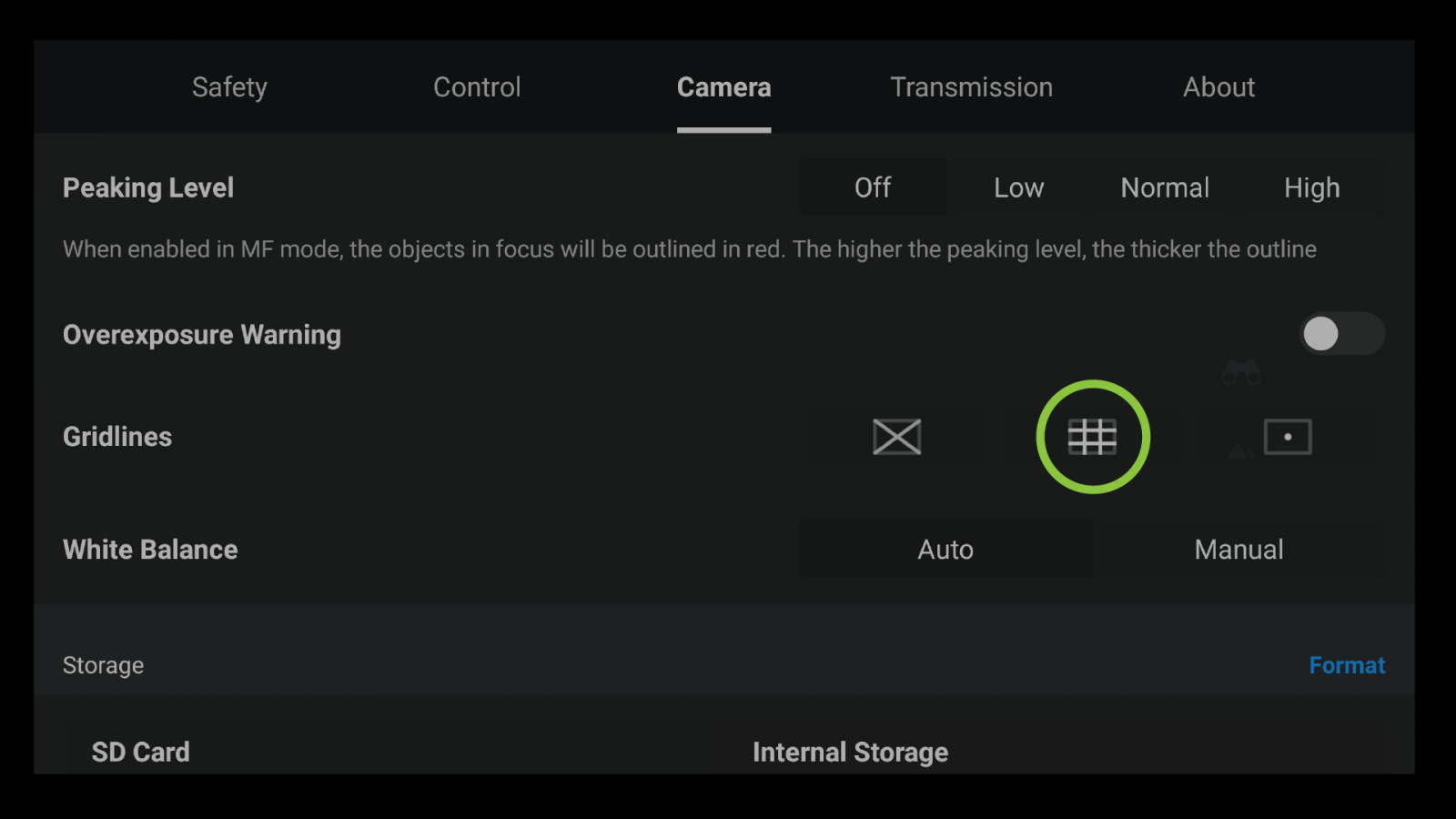
Nastavení mřížky v aplikaci DJI Fly
Nadir skenování pomocí Mavic 3
Máme tedy vybrané časované focení, dron nastavený v režimu kinematografie a povoleno pravidlo třetinového překrytí mřížky. Ujistěte se, že je nastavení fotoaparátu správné: je vybrán požadovaný formát, nastavena vysoká rychlost závěrky, clona na šířku a zvolena optimální hodnota ISO. V našem případě budeme létat za dokonalého středního denního světla ve výšce 50 metrů. Naše rychlost závěrky je nastavena na 1/1000 sekundy, clona je otevřená a ISO na 100. Fotografujeme ve formátu JPG.
Samotný let je velmi jednoduchý. Vzlétněte, dosáhněte požadované nadmořské výšky, najděte roh vašeho předmětu, kde chcete začít. Otočte fotoaparát přímo dolů a spusťte časované fotografování. Nyní je snímek pořízen každé 2 sekundy. Leťte vedle svého objektu maximální rychlostí pouze pomocí pravé páky, pohybujte se dozadu nebo dopředu (v závislosti na tom, který roh jste vybrali, a na orientaci vašeho dronu). Když dorazíte do druhého rohu, je čas pohnout se stranou. Protože naše mřížka rozděluje pohled na 3 stejné části, musíme dron posunout vodorovně o polovinu dělení. Najděte referenční bod na zemi, zkontrolujte, že se pohybuje o 1/6 šířky obrazu, a pak se zastavte.
Leťte vpřed nebo vzad, dokud nedosáhnete okraje skenované oblasti. Opakujte proces posunutí dronu do strany o 1/6 šířky obrazu a znovu se pohybujte vertikálně. Nyní by mělo být jasné, že vytváříme mřížku, zatímco dron nepřetržitě pořizuje snímky. To je přesně to, co plánovači letů dělají.
Jak vypadá vaše proletěná trajektorie, můžete zkontrolovat v zobrazení mapy aplikace. Pokud to není dokonalé – je to v pořádku. Drobné odchylky neovlivní kvalitu projektu fotogrammetrie. Nebojte se také provádět úpravy během letu. Ideální pozice kamery nevadí, pokud je přesah všude dobrý. Když se dostanete do posledního rohu objektu a celá skenovaná oblast je pokryta obrázky, vypněte časované snímání a vraťte se domů.
Takže opáčko
- Přepnout ovladač do režimu CINE.
- Nastavit režim focení na TimeShot - 2s.
- Citlivost ISO 100.
- Rychlost závěrky 1/1000s.
Výsledky
Výsledkem je dokonale použitelná, vysoce kvalitní sada snímků nadir. Pokrytí je dostatečné, rozlišení podle očekávání skvělé. Zpracujte tyto obrázky např. v Pix4D. To platí pro jakýkoli dron bez dostupných plánovačů letů a tuto jednoduchou techniku můžete vylepšit a přijmout tak, aby vyhovovala vašim potřebám. Tyto základy můžete například použít s fotoaparátem pod úhlem – šikmé skenování nebo dokonce vertikální skenování.
Literatura
Photogrammetry with the Mavic 3 – No Flight Planner Required Part 1. Online. ZMEJEVSKIS, Lukas. Pix-pro. 2022. Dostupné z: https://www.pix-pro.com/blog/post/photogrammetry-the-mavic-3. [cit. 2024-04-12].