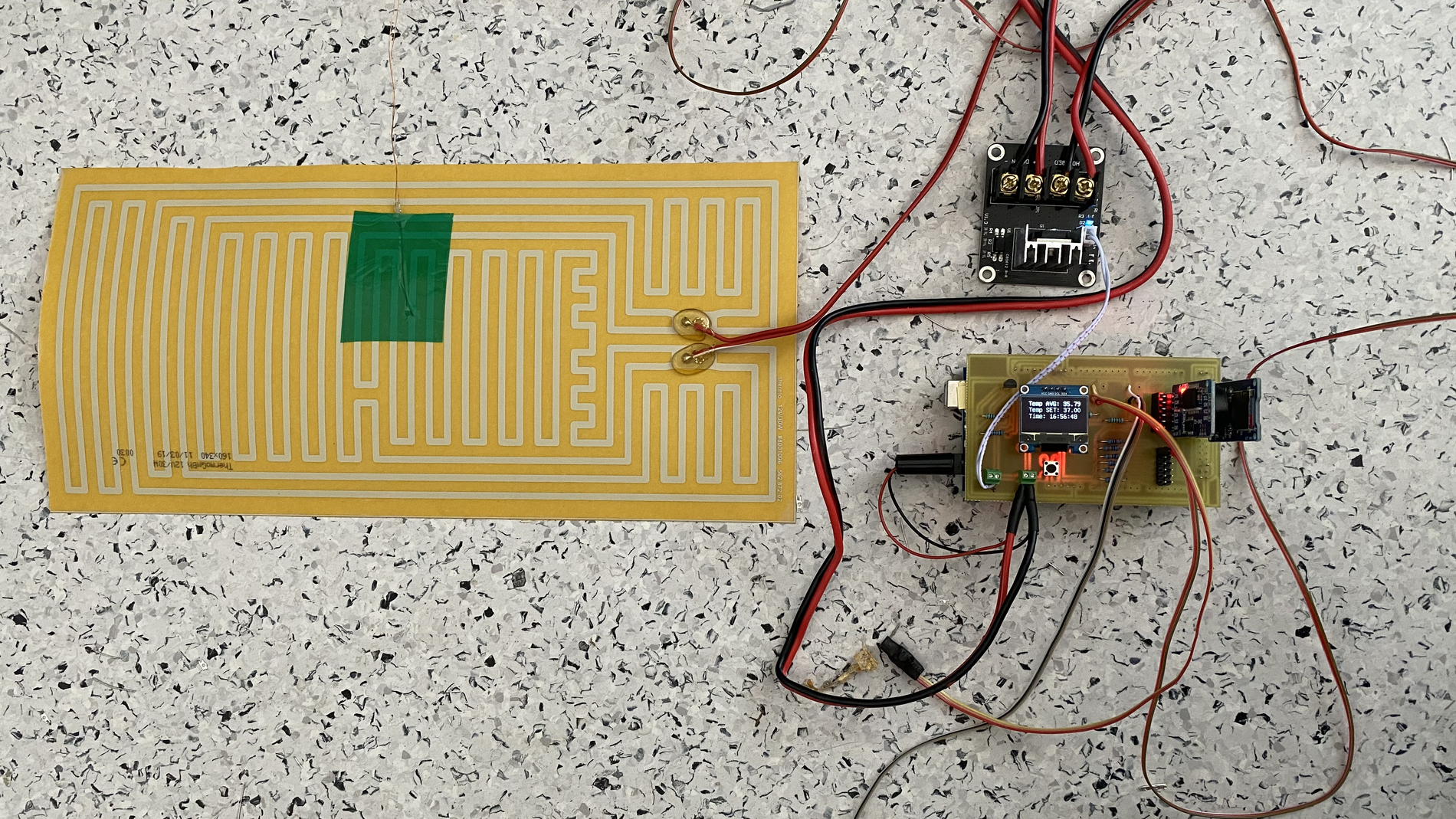
Projekt regulace teploty vyhřívané fólie vstoupil do druhé fáze, ve které se základní regulační obvod realizovaný pomocí drátových propojek nahradil PCB deskou.
V původním projektu byl obvod tvořen drátovými propojkami a to sebou přinášelo komplikace ve stabilitě obvodu. Proto byla navržena PCB deska, která celkovou konstrukci celého obvodu zjednodušila a její funkcionalita je bezpečnější. Navíc byla navržena tak, aby tvořila přídavné pole (shield) pro Arduino mega 2560.
Návrh obvodu
Veškerý návrh obvodu pro zapojení vyhřívané fólie byl realizován v CAD programu EAGLE.
.png)
Pro rychlý vývoj byly použity komponenty:
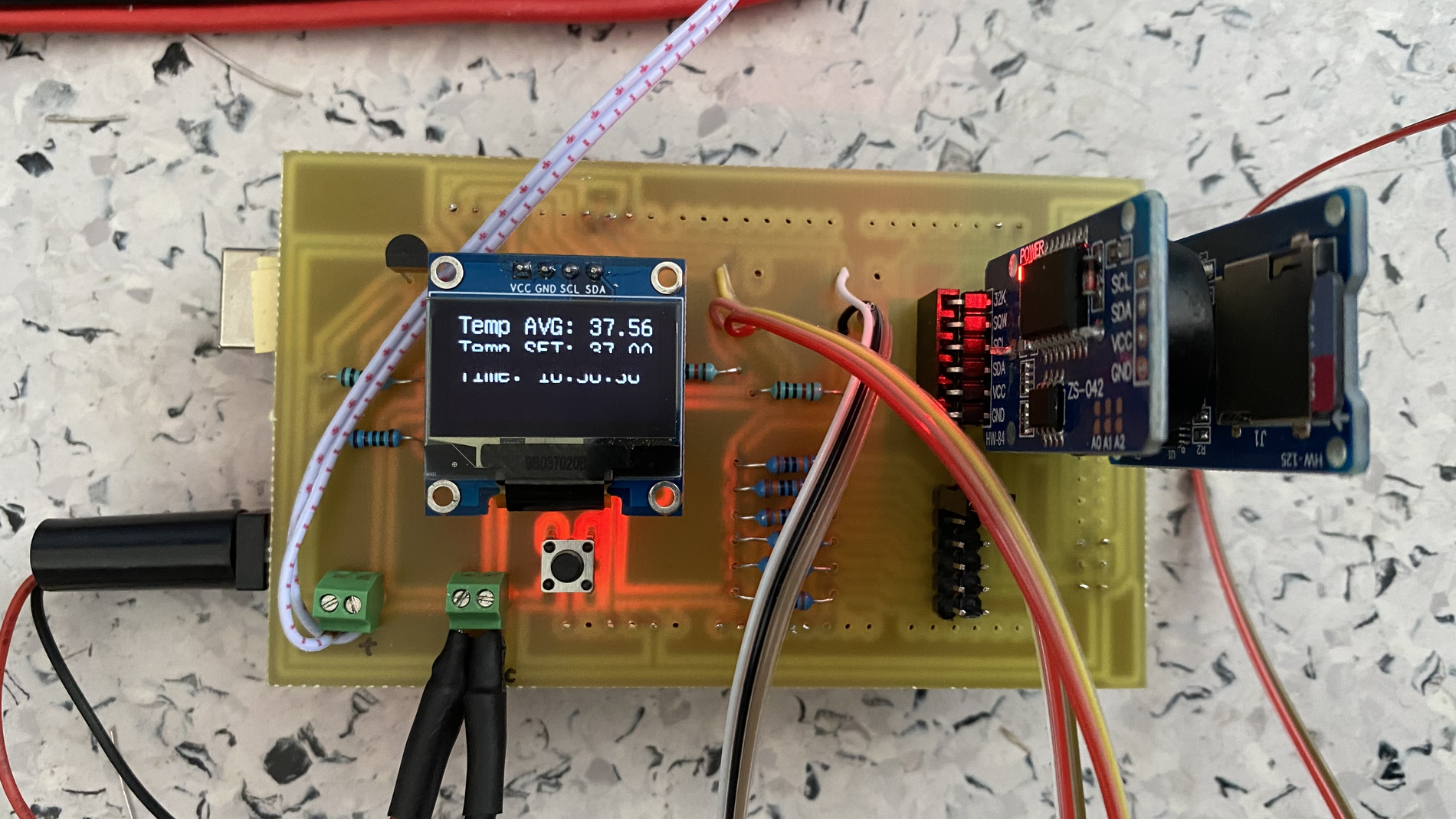
- Modul pro SD kartu, na kterou se ukládají záznamy o teplotě.
- RTC modul pro reálný čas.
- OLED display, který nahradil display NOKIA 3310. Ten byl absolutně nespolehlivý a vždy se po čase vypnul.
- Tlačítka (S1, S2) pro nastavení teploty a jedno pro reset (S3).
- Tranzistor BC337 do obvodu k zesilovači pro spínání MOSFETu, který je externě připojen ke svorce HOT BED Control In.
- Svorka pro připojení napájení jak desky.
- Sada pinů pro připojení teplotních čidel. Nyní jich lze připojit až 6. Jedná se o čidla dodávaná od společnosti MOUSER. Vyznačující se velmi rychlou reakční dobou a jejich rozměr je řádově 0.81mm. Přesnost je 0,1 stupně C.
- Rezistory 100kΩ, 10kΩ, 1kΩ.
- Řídící deskou je Arduino Mega 2560. U této desky se musí dát pozor na verzi, protože nemusí sedět zejména piny pro SCL a SDA, kterým se připojuje OLED display. Některé verze tto piny nemají dostupné ve dvou místech a musí se následně jediný pár rozdělit.
- Napájení celého obvodu, fólie a obvodu pro regulaci MOSFET je zajištěno zdrojem s několika výstupy 12V.
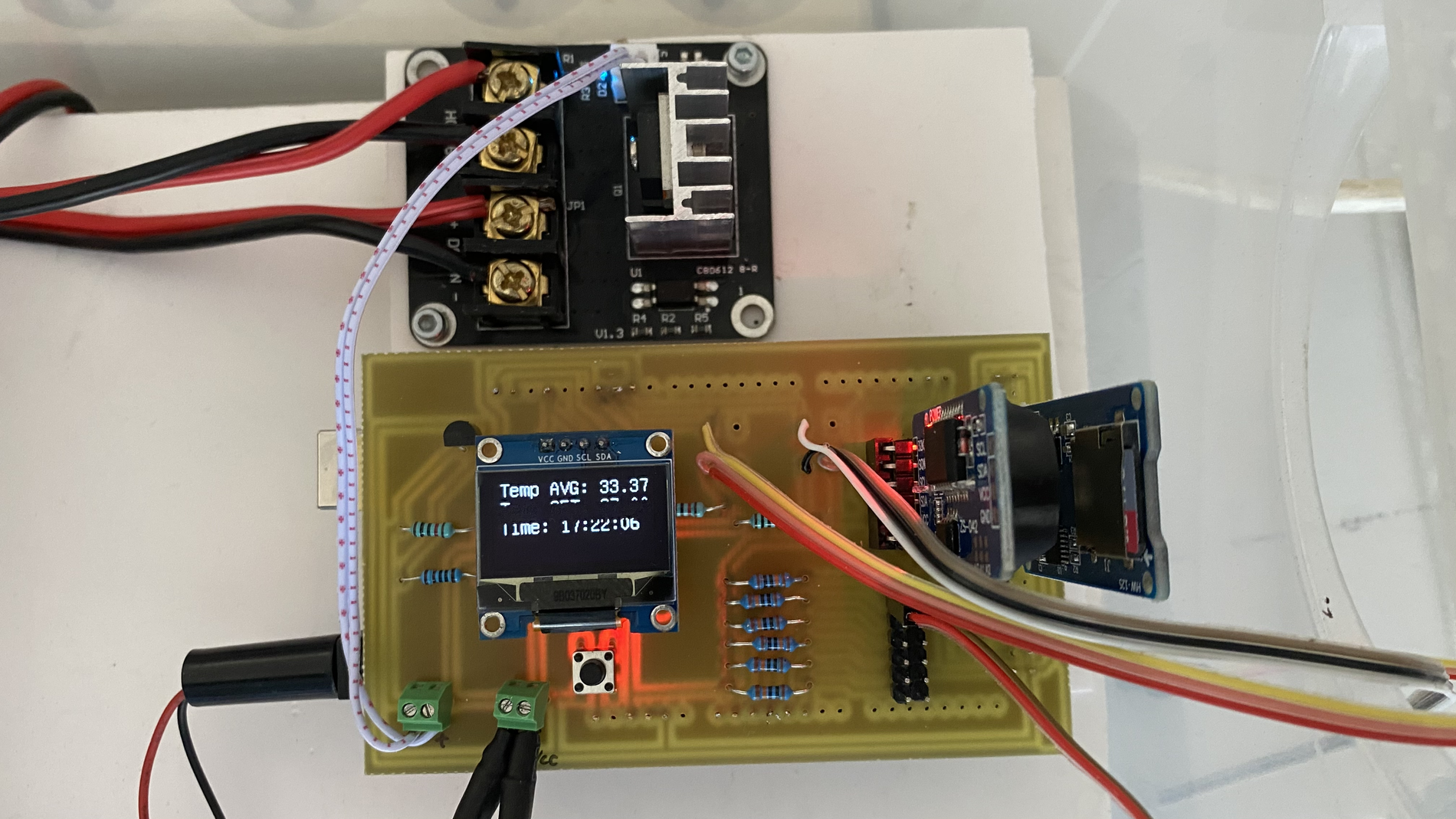
Návrh PCB
PCB byl realizován na jednovrstvou cuprex desku.
.png)
Díky konstrukci jako přídavného pole do Arduino mega je obvod velmi stabilní a tvoří kompaktní celek.
Programování
Programový kód byl použit stejný jako v první verzi akorát byl rozšířen a průměrování hodnot z dalších čidel. Záleží kolik čidel se používá. Využívá se algoritmu tzv. Kalmanova filtru, který zajišŤuje optimalizaci PID regulace.
#include <PID_v1.h>
#include "U8glib.h"
//#include <EEPROM.h>
#include <EEPROMex.h>
#include <PID_AutoTune_v0.h>
#include <DS3231.h>
#include <SPI.h>
#include <SD.h>
// Pins for display
#define RST 8
#define CE 7
#define DC 6
#define DIN 5
#define CLK 4
double Temp;
// Pin for buttons
int buttonPinI = 10;
int buttonPinD = 11;
double readingBtnI=0.1;
double readingBtnD=0.1;
int maxTempBed = 38; // Maximum temperature on heat bed
#define VCC 5 // Supply voltage
#define SAMPLETIME 100 // how long between pid/sampling
#define outputPin 9 // Analog output pin for MOSFET
#define TEMPERATURENOMINAL 25 // nominal teperature from datasheet thermistor
#define MEDIAN_COUNT 10
#define MEDIAN_DELAY 2
float a=1.110318693e-3;
float b=2.372661717e-4;
float c=0.7473992352e-7;
int numSamples=3; // how many samples to take and average
#define RT0 10000 // Ω for MOUSER thermistor
#define B 3921.26 // K for MOUSER
#define R 10362 // R=10KΩ for MOUSER
int numSensors=3;
//byte sensorPins[] = {A0,A1,A2};
byte sensorPins[] = {A0, A1, A2};
//
/*
#define RT0 100000 // Ω for HEAT BED thermistor
#define B 3950 // K for HEAT BED
#define R 100200 // R=100KΩ for HEAD BED
int numSensors=3;
byte sensorPins[] = {A5, A4, A3}; // define pins for thermistors
*/
// SD card
const int chipSelect = 53;
String fileName="logger.csv";
// Define the aggressive and conservative Tuning Parameters
//double aggKp=6, aggKi=0.4, aggKd=1;
//double consKp=1, consKi=0.05, consKd=0.25;
//double aggKp=15, aggKi=0.3, aggKd=0;
//double consKp=15, consKi=0.3, consKd=0;
//double aggKp=2, aggKi=5, aggKd=1;
//double consKp=2, consKi=5, consKd=1;
//double consKp=2,consKi=0.5,consKd=2;
//double consKp=10,consKi=0.8,consKd=3.4;
double consKp=75, consKi=5,consKd=4.3;
// Variables
float RT, VR, ln, TX, T0, VRT, average;
double input, Output, tempAvgIn, setPoint;
double setPointStart = 30.00;
// For tunning
byte ATuneModeRemember=2;
boolean tuning = false; // if want tunning PID
unsigned long modelTime, serialTime;
double kpmodel=1.5, taup=100, theta[50];
double outputStart=5;
double aTuneStep=20, aTuneNoise=1, aTuneStartValue=40;
unsigned int aTuneLookBack=20;
//----------------------------------------------
PID myPID(&input, &Output, &setPoint, consKp, consKi, consKd, P_ON_M, DIRECT);
PID_ATune aTune(&input, &Output);
// initialization RTC
Time t;
DS3231 rtc(SDA, SCL);
// initialization LCD display
U8GLIB_SSD1306_128X64 u8g(U8G_I2C_OPT_NONE);
void setup() {
//EEPROM.writeDouble(1, 36);
if(tuning){
tuning=false;
changeAutoTune();
tuning=true;
}
serialTime = 0;
Serial.begin(9600);
pinMode(buttonPinI, INPUT);
pinMode(buttonPinD, INPUT);
setPoint=EEPROM.readDouble(1);
if(setPoint==0 || isnan(setPoint)){
setPoint = setPointStart;
myPID.Compute();
}
myPID.SetMode(AUTOMATIC);
myPID.SetSampleTime(SAMPLETIME);
T0 = 25 + 273.15; // Temperature T0 from datasheet, conversion from Celsius to kelvin
pinMode(chipSelect, OUTPUT);
Initialize_SDcard();
Initialize_RTC();
}
void draw(void) {
// graphic commands to redraw the complete screen should be placed here
u8g.setFont(u8g_font_unifont);
u8g.setPrintPos(0, 20);
// call procedure from base class, http://arduino.cc/en/Serial/Print
u8g.print("Ahoj!");
}
double Thermistor(int RawADC) {
//Connection 5V - Thermistor - AI - 10k - GND
/*
average = 1024 / average - 1;
average = R / average;
float steinhart;
steinhart = average / RT0; // (R/Ro)
steinhart = log(steinhart); // ln(R/Ro)
steinhart /= B; // 1/B * ln(R/Ro)
steinhart += 1.0 / (TEMPERATURENOMINAL + 273.15); // + (1/To)
steinhart = 1.0 / steinhart; // Invert
steinhart -= 273.15; // convert to C
double Temp=steinhart;
*/
Temp = log(R * ((1024.0 / RawADC - 1)));
Temp = 1 / (a + (b + (c * Temp * Temp )) * Temp );
Temp = Temp - 273.15; // Convert Kelvin to Celcius
return Temp;
}
void isort(int *a, int n)
{
for (int i = 1; i < n; i++)
{
int j = a[i];
int k;
for (k = i - 1; (k >= 0) && (j < a[k]); k--)
{
a[k + 1] = a[k];
}
a[k + 1] = j;
}
}
int analogReadMedian(int port)
{
int values[MEDIAN_COUNT];
for(int i =0; i < MEDIAN_COUNT; i++)
{
values[i] = analogRead(port);
delay(MEDIAN_DELAY);
}
isort(values, MEDIAN_COUNT);
return values[MEDIAN_COUNT / 2 + 1];
}
double readTemp(byte tempPin, int numSamples) {
uint8_t i;
average = 0;
// take N samples in a row, with a slight delay
for (i = 0; i < numSamples; i++) {
//average += analogRead(tempPin); // ctemem teplotu
average = analogReadMedian(tempPin);
delay(10);
}
//average /= numSamples;
double inputT=Thermistor(average);
Serial.print("Therm:"); Serial.print(tempPin);Serial.print("-");Serial.print(inputT);Serial.print(" / ");
return inputT;
}
void loop() {
t=rtc.getTime();
readingBtnI = digitalRead(buttonPinI);
readingBtnD = digitalRead(buttonPinD);
if(readingBtnI == HIGH){
setPoint=setPoint+0.1;
EEPROM.writeDouble(1, setPoint);
}
if(readingBtnD == HIGH){
setPoint=setPoint-0.1;
EEPROM.writeDouble(1, setPoint);
}
uint8_t j;
double inputS=0;
for(j=0; j<numSensors; j++){
inputS+=readTemp(sensorPins[j], numSamples);
}
input=inputS/numSensors;
/*
double gap = abs(setPoint-input); //distance away from setpoint
if(gap<0.4){ //we're close to setpoint, use conservative tuning parameters
//myPID.SetTunings(consKp, consKi, consKd);
}else{ //we're far from setpoint, use aggressive tuning parameters
//myPID.SetTunings(aggKp, aggKi, aggKd);
}
*/
if(tuning){
byte val = (aTune.Runtime());
if (val!=0){
tuning = false;
}
if(!tuning){ //we're done, set the tuning parameters
consKp = aTune.GetKp();
consKi = aTune.GetKi();
consKd = aTune.GetKd();
myPID.SetTunings(consKp,consKi,consKd);
AutoTuneHelper(false);
}
}else{
myPID.Compute();
}
if( input<setPoint){
analogWrite(outputPin, Output);
}else{
Output=0;
analogWrite(outputPin, Output);
}
// Actual temperature on Heat Bed
String tempC=String(input);
String tempSetC=String(setPoint);
u8g.firstPage();
do {
u8g.setFont(u8g_font_unifont);
u8g.setPrintPos(5, 10);
u8g.print("Temp AVG: ");
u8g.print(tempC);
u8g.setPrintPos(5, 25);
u8g.print("Temp SET: ");
u8g.print(tempSetC);
u8g.setPrintPos(5, 40);
u8g.print("Time: ");
u8g.print(rtc.getTimeStr());
} while( u8g.nextPage() );
/*
Serial.print("Temperature:");
Serial.print("t");
Serial.print(input);
Serial.print("t");
Serial.print("setPoint:");
Serial.print("t");
Serial.print(setPoint);
Serial.println("");
Serial.print("t");
Serial.print("Ctt");
Serial.print(input + 273.15); //Conversion to Kelvin
Serial.print("Ktt");
Serial.print((input * 1.8) + 32); //Conversion to Fahrenheit
Serial.print("F");
Serial.print("tt A0 ");
//Serial.print(VRTa);
Serial.print("tt");
Serial.print(Output);
Serial.println("tt");
*/
//send-receive with processing if it's time
if(millis()>serialTime){
SerialReceive();
SerialSend();
serialTime+=200;
}
if((t.min==0 || t.min==5 || t.min==10 || t.min==15 || t.min==20 || t.min==25 || t.min==30 || t.min==35 || t.min==40 || t.min==45 || t.min==50 || t.min==55 ) && t.sec==0){
Write_SDcard();
delay(1000);
}
delay(SAMPLETIME);
}
void changeAutoTune(){
if(!tuning){
//Set the output to the desired starting frequency.
Output=aTuneStartValue;
aTune.SetNoiseBand(aTuneNoise);
aTune.SetOutputStep(aTuneStep);
aTune.SetLookbackSec((int)aTuneLookBack);
AutoTuneHelper(true);
tuning = true;
}else{ //cancel autotune
aTune.Cancel();
tuning = false;
AutoTuneHelper(false);
}
}
void AutoTuneHelper(boolean start){
if(start){
ATuneModeRemember = myPID.GetMode();
}else{
myPID.SetMode(ATuneModeRemember);
}
}
void SerialSend(){
Serial.print("setpoint: ");Serial.print(setPoint); Serial.print(" ");
Serial.print("input: ");Serial.print(input); Serial.print(" ");
Serial.print("output: ");Serial.print(Output); Serial.print(" ");Serial.println();
if(tuning){
Serial.println("tuning mode");
}else{
/*
Serial.print("kp: ");Serial.print(myPID.GetKp());Serial.print(" ");
Serial.print("ki: ");Serial.print(myPID.GetKi());Serial.print(" ");
Serial.print("kd: ");Serial.print(myPID.GetKd());Serial.println();
*/
}
}
void SerialReceive(){
if(Serial.available()){
char b = Serial.read();
Serial.flush();
if((b=='1' && !tuning) || (b!='1' && tuning)){
changeAutoTune();
}
}
}
// ************** HW ***************
// Init the DS3231 using the hardware interface
void Initialize_RTC()
{
// Initialize the rtc object
rtc.begin();
//#### the following lines can be uncommented to set the date and time for the first time###
/*
rtc.setDOW(WEDNESDAY); // Set Day-of-Week to SUNDAY
rtc.setTime(14, 21, 00); // Set the time to 12:00:00 (24hr format)
rtc.setDate(23, 6, 2021); // Set the date to January 1st, 2014
*/
}
void Initialize_SDcard()
{
delay(3000);
Serial.println("Initializing SD card...");
if (!SD.begin(chipSelect)) {
Serial.println("Initialization failed!");
return;
}
Serial.println("Initialization done.");
/*
delay(1000);
if (SD.exists(fileName.c_str())) {
Serial.println("Old file deleted ...");
SD.remove(fileName.c_str());
}
*/
delay(1000);
Serial.println("Create new file...");
File dataFile = SD.open(fileName.c_str(), FILE_WRITE);
dataFile.println("Date;Time;Temp;SetPoint");
dataFile.close();
delay(5000);
Serial.println("========START========");
}
void Write_SDcard()
{
File dataFile = SD.open(fileName.c_str(), FILE_WRITE);
if (dataFile) {
dataFile.print(rtc.getDateStr());
dataFile.print(";");
dataFile.print(rtc.getTimeStr());
dataFile.print(";");
dataFile.print(input);
dataFile.print(";");
dataFile.print(setPoint);
dataFile.print(";");
dataFile.println();
dataFile.close(); //Close the file
}else{
Serial.println("OOPS!! SD card writing failed");
}
}Soubory ke stažení
Soubory EAGLE - zip
Souboru Arduino - zip