Jednoduchý příklad, ve kterém se využívá čidla BME280 pro měření teploty, vlhkosti a tlaku. Jedná se pouze o ukázku zapojení a kódu pro získání uvedených veličin.
Senzorový modul BME280
Senzorový modul BME280 čte barometrický tlak, teplotu a vlhkost. Protože se tlak mění s nadmořskou výškou, můžete také odhadnout nadmořskou výšku. Existuje několik verzí tohoto senzorového modulu. Používáme modul znázorněný na obrázku níže.
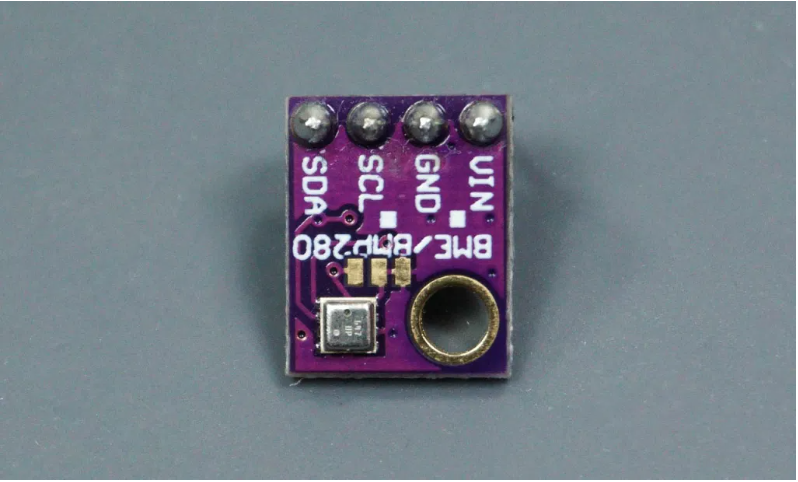
Tento senzor komunikuje pomocí komunikačního protokolu I2C, takže zapojení je velmi jednoduché. Můžete použít výchozí piny ESP32 I2C, jak je uvedeno v následující tabulce:
| BME280 | ESP32 |
| Vin | 3,3 V |
| GND | GND |
| SCL | GPIO 22 |
| SDA | GPIO 21 |
Existují další verze tohoto senzoru, které mohou používat komunikační protokoly SPI nebo I2C, jako je modul zobrazený na následujícím obrázku:
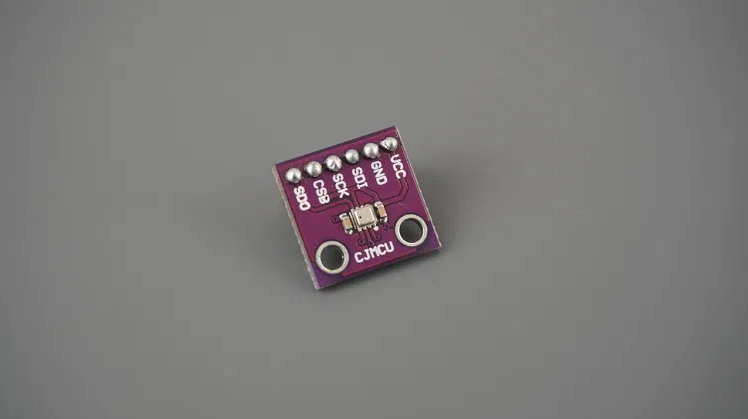
Pokud používáte jeden z těchto senzorů, pro použití komunikačního protokolu I2C použijte následující piny:
| BME280 | ESP32 |
| SCK (SCL Pin) | GPIO 22 |
| SDI (SDA pin) | GPIO 21 |
Pokud používáte komunikační protokol SPI, musíte použít následující piny:
| BME280 | ESP32 |
| SCK (SPI hodiny) | GPIO 18 |
| SDO (MISO) | GPIO 19 |
| SDI (MOSI) | GPIO 23 |
| CS (výběr čipu) | GPIO 5 |
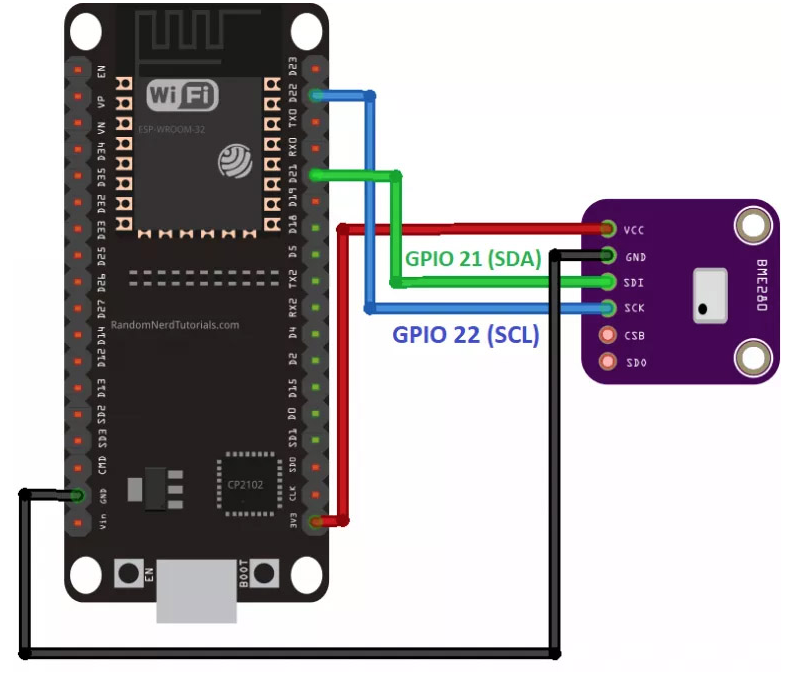
Schéma – ESP32 s BME280 pomocí I2C
Použijeme I2C komunikaci se senzorovým modulem BME280. Za tímto účelem připojte snímač k ESP32 SDA a SCL kolíky, jak ukazuje následující schematický diagram.
Čtení tlaku, teploty a vlhkosti
Kód pro čtení uvedených veličin je poměrně jednoduchý.
#include <Wire.h>
#include <Adafruit_Sensor.h>
#include <Adafruit_BME280.h>
/*#include <SPI.h>
#define BME_SCK 18
#define BME_MISO 19
#define BME_MOSI 23
#define BME_CS 5*/
#define SEALEVELPRESSURE_HPA (1013.25)
#define CORRECT_TEMP (0.40)
Adafruit_BME280 bme; // I2C
//Adafruit_BME280 bme(BME_CS); // hardware SPI
//Adafruit_BME280 bme(BME_CS, BME_MOSI, BME_MISO, BME_SCK); // software SPI
void setup() {
Serial.begin(115200);
bool status = bme.begin(0x76);
if (!status) {
Serial.println("Could not find a valid BME280 sensor, check wiring or change I2C address!");
while (1);
}
}
void loop() {
String temp=String(bme.readTemperature()-CORRECT_TEMP);
String hum=String(bme.readHumidity());
String press=String(bme.readPressure()/100.0F);
String alt=String(bme.readAltitude(SEALEVELPRESSURE_HPA));
Serial.print("Teplota: " + temp +" Vlhkost: "+ hum +" Tlak: "+ press+" Nadm. výška: "+ alt);
Serial.println();
delay(5000);
}
Jak kód funguje
Knihovny
Kód začíná zahrnutím potřebných knihoven: knihovna wire je pro použití I2C a Adafruit_Sensor a Adafruit_BME280 knihovny pro rozhraní se senzorem BME280.
#include <Wire.h>
#include <Adafruit_Sensor.h>
#include <Adafruit_BME280.h>
SPI komunikace
Vzhledem k tomu, že budeme používat komunikaci I2C, jsou komentovány následující řádky, které definují piny SPI:
/*#include <SPI.h>
#define BME_SCK 18
#define BME_MISO 19
#define BME_MOSI 23
#define BME_CS 5*/
Poznámka: Pokud používáte komunikaci SPI, použijete piny ESP32 SPI. Pro SPI komunikaci na ESP32 můžete použít buď HSPI nebo VSPI piny, jak ukazuje následující tabulka.
| SPI | MOSI | MISO | CLK | CS |
| HSPI | GPIO 13 | GPIO 12 | GPIO 14 | GPIO 15 |
| VSPI | GPIO 23 | GPIO 19 | GPIO 18 | GPIO 5 |
Tlak hladiny moře
Proměnná s názvem SEALEVELPRESSURE_HPA je vytvořen.
#define SEALEVELPRESSURE_HPA (1013.25)
Tato proměnná ukládá tlak na hladině moře v hektopascalech (odpovídá milibarům). Tato proměnná se používá k odhadu nadmořské výšky pro daný tlak porovnáním s tlakem na hladině moře. Tento příklad používá výchozí hodnotu, ale pro přesnější výsledky nahraďte hodnotu aktuálním tlakem hladiny moře ve vaší lokalitě.
I2C
Tento příklad standardně používá komunikační protokol I2C. Jak vidíte, stačí vytvořit Adafruit_BME280 objekt tzv bme.
Adafruit_BME280 bme; // I2C
Chcete-li použít SPI, musíte okomentovat tento předchozí řádek a odkomentovat jeden z následujících řádků v závislosti na tom, zda používáte hardwarové nebo softwarové SPI (hardwarové SPI používá výchozí piny HSPI ESP32; softwarové SPI používá piny definované v kódu).
//Adafruit_BME280 bme(BME_CS); // hardware SPI
//Adafruit_BME280 bme(BME_CS, BME_MOSI, BME_MISO, BME_SCK); // software SPI
Tisk hodnot
Čtení teploty, vlhkosti, tlaku a odhadované nadmořské výšky je stejně jednoduché jako použití následujících metodbmeobjekt:
- bme.readTemperature()– čte teplotu ve stupních Celsia;
- bme.readHumidity()– odečítá absolutní vlhkost;
- bme.readPressure()– odečte tlak v hPa (hectoPascal = milibar);
- bme.readAltitude(SEALEVELPRESSURE_HPA)– odhaduje nadmořskou výšku v metrech na základě tlaku na hladině moře.
Níže je uveden skript, který pracuje s předpovědí počasí s využitím BME280. Jedná se o kód z jiného projektu, ale jeho přizpůsobení je jednoduché.
#define GENERATE_FORECAST
// LIBRARIES
#include <SPI.h> // A communication backbone, the Serial Peripheral Interface.
#include <MySensors.h> // The MySensors library. Hurray!
#include <Wire.h> // Enables the Wire communication protocol.
//#include <Adafruit_BME280.h> // alternative library you could try (DIY; no code for this is in here yet).
//#include <SparkFunBME280.h> // alternative library you could try (DIY; no code for this is in here yet).
#include <BME280_MOD-1022.h> // Bosch BME280 Embedded Adventures MOD-1022 weather multi-sensor Arduino code, written originally by Embedded Adventures. https://github.com/embeddedadventures/BME280
// VARIABLES YOU CAN CHANGE
const float ALTITUDE = 14; // Change this value to your location's altitude (in m). Use your smartphone GPS to get an accurate value, or use an online map.
unsigned long BME280measurementInterval = 60000; // Sleep time between reads for the BME sensor (in ms). Keep this value at 60000 if you have enabled the forecast feature, as the forecast algorithm needs a sample every minute.
#define COMPARE_TEMP 1 // Send temperature only if it changed? 1 = Yes 0 = No. Can save battery.
float tempThreshold = 0.1; // How big a temperature difference has to minimally be before an update is sent. Makes the sensor less precise, but also less jittery, and can save battery.
#define COMPARE_HUM 1 // Send humidity only if changed? 1 = Yes 0 = No. Can save battery.
float humThreshold = 0.1; // How big a humidity difference has to minimally be before an update is sent. Makes the sensor less precise, but also less jittery, and can save battery.
#define COMPARE_BARO 1 // Send barometric pressure only if changed? 1 = Yes 0 = No. Can save battery.
float presThreshold = 0.1; // How big a barometric difference has to minimally be before an update is sent. Makes the sensor less precise, but also less jittery, and can save battery.
// VARIABLES YOU PROBABLY SHOULDN'T CHANGE
#define TEMP_CHILD_ID 0 // for MySensors. Within this node each sensortype should have its own ID number.
#define HUM_CHILD_ID 1 // for MySensors. Within this node each sensortype should have its own ID number.
#define BARO_CHILD_ID 2 // for MySensors. Within this node each sensortype should have its own ID number.
float lastTemperature = -1; // Stores the previous measurement, so it can be compared with a new measurement.
float lastHumidity = -1; // Stores the previous measurement, so it can be compared with a new measurement.
float lastPressure = -1; // Stores the previous measurement, so it can be compared with a new measurement.
unsigned long BME280measurementSleepTime = 0; // variable to store the calculated Sleep time if the node is battery powered.
bool metric = true; // Variable that stores if the sensor will output the temperature in Fahrenheit of Celsius. The gateway sends this preference to the node, so you dont need to change it here.
bool receivedConfig = false; // The MySensors gateway will tell the node if it should output in metric or not.
#define CONVERSION_FACTOR (1.0/10.0) // used by forecast algorithm to convert from Pa to kPa, by dividing hPa by 10.
#ifdef GENERATE_FORECAST // Below you will find a lot of variables used by the forecast algorithm.
const char *weather[] = { "stable", "sunny", "cloudy", "unstable", "thunderstorm", "unknown" };
enum FORECAST
{
STABLE = 0, // "Stable Weather Pattern"
SUNNY = 1, // "Slowly rising Good Weather", "Clear/Sunny "
CLOUDY = 2, // "Slowly falling L-Pressure ", "Cloudy/Rain "
UNSTABLE = 3, // "Quickly rising H-Press", "Not Stable"
THUNDERSTORM = 4, // "Quickly falling L-Press", "Thunderstorm"
UNKNOWN = 5 // "Unknown (More Time needed)
};
int lastForecast = -1; // Stores the previous forecast, so it can be compared with a new forecast.
const int LAST_SAMPLES_COUNT = 5;
float lastPressureSamples[LAST_SAMPLES_COUNT];
int minuteCount = 0; // Helps the forecast algorithm keep time.
bool firstRound = true; // Helps the forecast algorithm recognise if the sensor has just been powered up.
float pressureAvg; // Average value is used in forecast algorithm.
float pressureAvg2; // Average after 2 hours is used as reference value for the next iteration.
float dP_dt; // Pressure delta over time
#endif
// MYSENSORS COMMUNICATION VARIABLES
MyMessage temperatureMsg(TEMP_CHILD_ID, V_TEMP);
MyMessage humidityMsg(HUM_CHILD_ID, V_HUM);
MyMessage pressureMsg(BARO_CHILD_ID, V_PRESSURE);
#ifdef GENERATE_FORECAST
MyMessage forecastMsg(BARO_CHILD_ID, V_FORECAST);
#endif
void setup() {
Wire.begin(); // Wire.begin(sda, scl) // starts the wire communication protocol, used to chat with the BME280 sensor.
Serial.begin(115200); // for serial debugging over USB.
Serial.println("Hello world, I am a sensor node.");
#ifdef BATTERY_POWERED // If the node is battery powered, we'll let Sleep take over the scheduling.
BME280measurementSleepTime = BME280measurementInterval;
BME280measurementInterval = 0; // When the Arduino is asleep, millis doesn't increment anymore (time stops as it were). To fix this, we'll set the measurement interval time to 1, so that when the arduino wakes up it will immediately try to measure again.
#endif
}
void presentation() {
// Send the sketch version information to the gateway and Controller
sendSketchInfo("BME280 Sensor", "1.1");
// Tell the MySensors gateway what kind of sensors this node has, and what their ID's on the node are, as defined in the code above.
present(BARO_CHILD_ID, S_BARO);
present(TEMP_CHILD_ID, S_TEMP);
present(HUM_CHILD_ID, S_HUM);
}
void loop() {
// You should not change these variables:
static unsigned long previousBME280Millis = 0; // Used to remember the time that the BME280 sensor was asked for a measurement.
unsigned long currentMillis = millis(); // The time since the sensor started, counted in milliseconds. This script tries to avoid using the Sleep function, so that it could at the same time be a MySensors repeater.
static boolean BME280shouldAsk = true; // This is true when the time is right for a new measurement to be made.
static boolean BME280justAsked = false; // This indicates whether we have just asked the sensor module for a measurement, so the receiving part of the code (part 2) should be primed. This two-part construction helps to bridge the time where the BME280 module is busy, without blocking the entire node from doing anything else (like being a repeater, or working with other connected sensor modules).
// PART 1. If enough time has passed, a new measurement should be taken:
if (BME280shouldAsk == true && currentMillis - previousBME280Millis >= BME280measurementInterval) {
previousBME280Millis = currentMillis; // store the current time as the previous measurement start time.
BME280shouldAsk = false;
Serial.println("");
Serial.println("BME280 - Requesting new data from sensor module.");
BME280.readCompensationParams(); // Need to read the NVM compensation parameters.
#ifdef BATTERY_POWERED
// After taking the measurement the chip goes back to sleep. This code is only enabled if you enabled BATTERY POWERED at the top of this script.
// Oversampling settings (os1x, os2x, os4x, os8x or os16x).
BME280.writeFilterCoefficient(fc_16); // IIR Filter coefficient, higher numbers avoid sudden changes to be accounted for (such as slamming a door)
BME280.writeOversamplingPressure(os16x); // pressure x16
BME280.writeOversamplingTemperature(os8x); // temperature x8
BME280.writeOversamplingHumidity(os8x); // humidity x8
BME280.writeMode(smForced); // Forced sample. After taking the measurement the chip goes back to sleep.
#else
// Normal mode for regular automatic samples
BME280.writeStandbyTime(tsb_0p5ms); // tsb = 0.5ms
BME280.writeFilterCoefficient(fc_16); // IIR Filter coefficient 16
BME280.writeOversamplingPressure(os16x); // pressure x16
BME280.writeOversamplingTemperature(os8x); // temperature x8
BME280.writeOversamplingHumidity(os8x); // humidity x8
BME280.writeMode(smNormal);
#endif
// As we exit part 1, in theory BME280.isMeasuring() should now be true.
BME280justAsked = true;
}
// Part 2. This will trigger if the sensor has just been asked for a measurement, and is also just done figuring out those measurements.
if(BME280justAsked == true && BME280.isMeasuring() == false) { //
BME280justAsked = false; // makes sure we don't do this part again in the next pass through the main loop.
Serial.println("BME280 - Sensor module has some new values ready:");
// Read out the data - must do this before calling the getxxxxx routines
BME280.readMeasurements();
float temperature = BME280.getTemperatureMostAccurate(); // Must get the temperature first.
float humidity = BME280.getHumidityMostAccurate(); // Get the humidity.
float pressure_local = BME280.getPressureMostAccurate(); // Get pressure at current location
float pressure = pressure_local/pow((1.0 - ( ALTITUDE / 44330.0 )), 5.255); // Adjust to sea level pressure using user altitude
#ifdef GENERATE_FORECAST
int forecast = sample(pressure); // Run the forecast function with a new pressure update.
#endif
if (!metric) {
// Convert temperature to fahrenheit
temperature = temperature * 9.0 / 5.0 + 32.0;
}
// Useful for debugging
Serial.print("BME280 - Temperature = ");
Serial.print(temperature);
Serial.println(metric ? " °C" : " °F");
Serial.print("BME280 - Humidity = ");
Serial.print(humidity);
Serial.println(" %");
Serial.print("BME280 - Pressure = ");
Serial.print(pressure);
Serial.println(" hPa");
#ifdef GENERATE_FORECAST
Serial.print("BME280 - Forecast = ");
Serial.println(weather[forecast]);
#endif
// Now, let's send the measurements to the gateway.
// Send temperature
if (COMPARE_TEMP == 1 && abs(temperature - lastTemperature) < tempThreshold) { // is the temperature difference bigger than the threshold?
Serial.print(temperature - lastTemperature);
Serial.print("- BME280 - Temperature difference too small, so not sending the new measurement to the gateway.\n");
} else {
Serial.print("BME280 - Sending the new temperature to the gateway.\n");
send(temperatureMsg.set(temperature, 1));
lastTemperature = temperature; // Save new temperatures to be able to compare in the next round.
}
// Send humidity
if (COMPARE_HUM == 1 && abs(humidity - lastHumidity) < humThreshold) { // is the humidity difference bigger than the threshold?
Serial.print(humidity - lastHumidity);
Serial.println("- BME280 - Humidity difference too small, so not sending the new measurement to the gateway.");
} else {
Serial.println("BME280 - Sending the new humidity to the gateway.");
send(humidityMsg.set(humidity, 1));
lastHumidity = humidity; // Save new humidity to be able to compare in the next round.
}
// Send pressure
if (COMPARE_BARO == 1 && abs(pressure - lastPressure) < presThreshold) { // is the pressure difference bigger than the threshold?
Serial.print(pressure - lastPressure);
Serial.println("- BME280 - Pressure difference too small, so not sending the new measurement to the gateway.");
} else {
Serial.println("BME280 - Sending the new pressure to the gateway.");
send(pressureMsg.set(pressure, 1));
lastPressure = pressure; // Save new pressure to be able to compare in the next round.
}
#ifdef GENERATE_FORECAST
// Send forecast
if (forecast != lastForecast) {
Serial.println("BME280 - Sending the latest forecast to the gateway.");
send(forecastMsg.set(weather[forecast]));
lastForecast = forecast;
}
#endif
Serial.println("BME280 - Measurement complete. Going to wait until next measurement.");
BME280shouldAsk = true; // Ready for the new round.
}
#ifdef BATTERY_POWERED
// This code will only be included in the sketch if the BATTERY POWERED feature is enabled.
if(BME280shouldAsk == true && BME280justAsked == false) { // Both parts are done, so we can let the sensor sleep again.
unsigned long quicktimecheck = millis(); // To check how much time has passed since the beginning of being awake, and then calculate from that how long to sleep until the next intended measuring time, we need to know how many milliseconds have passed.
unsigned long sleeptime = BME280measurementSleepTime - (quicktimecheck - previousBME280Millis); // How much time has passed already during the calculating? Subtract that from the intended interval time.
Serial.println("BME280 - zzzzZZZZzzzzZZZZzzzz");
sleep(sleeptime);
Serial.println("BME280 - Waking up.");
}
#endif
} // end of main loop.
#ifdef GENERATE_FORECAST
// These functions are only included if the forecast function is enables. The are used to generate a weater prediction by checking if the barometric pressure is rising or falling over time.
float getLastPressureSamplesAverage()
{
float lastPressureSamplesAverage = 0;
for (int i = 0; i < LAST_SAMPLES_COUNT; i++) {
lastPressureSamplesAverage += lastPressureSamples[i];
}
lastPressureSamplesAverage /= LAST_SAMPLES_COUNT;
return lastPressureSamplesAverage;
}
// Forecast algorithm found here
// http://www.freescale.com/files/sensors/doc/app_note/AN3914.pdf
// Pressure in hPa --> forecast done by calculating kPa/h
int sample(float pressure) {
// Calculate the average of the last n minutes.
int index = minuteCount % LAST_SAMPLES_COUNT;
lastPressureSamples[index] = pressure;
minuteCount++;
if (minuteCount > 185) {
minuteCount = 6;
}
if (minuteCount == 5) {
pressureAvg = getLastPressureSamplesAverage();
}
else if (minuteCount == 35) {
float lastPressureAvg = getLastPressureSamplesAverage();
float change = (lastPressureAvg - pressureAvg) * CONVERSION_FACTOR;
if (firstRound) { // first time initial 3 hour
dP_dt = change * 2; // note this is for t = 0.5hour
}
else {
dP_dt = change / 1.5; // divide by 1.5 as this is the difference in time from 0 value.
}
}
else if (minuteCount == 65) {
float lastPressureAvg = getLastPressureSamplesAverage();
float change = (lastPressureAvg - pressureAvg) * CONVERSION_FACTOR;
if (firstRound) { //first time initial 3 hour
dP_dt = change; //note this is for t = 1 hour
}
else {
dP_dt = change / 2; //divide by 2 as this is the difference in time from 0 value
}
}
else if (minuteCount == 95) {
float lastPressureAvg = getLastPressureSamplesAverage();
float change = (lastPressureAvg - pressureAvg) * CONVERSION_FACTOR;
if (firstRound) { // first time initial 3 hour
dP_dt = change / 1.5; // note this is for t = 1.5 hour
}
else {
dP_dt = change / 2.5; // divide by 2.5 as this is the difference in time from 0 value
}
}
else if (minuteCount == 125) {
float lastPressureAvg = getLastPressureSamplesAverage();
pressureAvg2 = lastPressureAvg; // store for later use.
float change = (lastPressureAvg - pressureAvg) * CONVERSION_FACTOR;
if (firstRound) { // first time initial 3 hour
dP_dt = change / 2; // note this is for t = 2 hour
}
else {
dP_dt = change / 3; // divide by 3 as this is the difference in time from 0 value
}
}
else if (minuteCount == 155) {
float lastPressureAvg = getLastPressureSamplesAverage();
float change = (lastPressureAvg - pressureAvg) * CONVERSION_FACTOR;
if (firstRound) { // first time initial 3 hour
dP_dt = change / 2.5; // note this is for t = 2.5 hour
}
else {
dP_dt = change / 3.5; // divide by 3.5 as this is the difference in time from 0 value
}
}
else if (minuteCount == 185) {
float lastPressureAvg = getLastPressureSamplesAverage();
float change = (lastPressureAvg - pressureAvg) * CONVERSION_FACTOR;
if (firstRound) { // first time initial 3 hour
dP_dt = change / 3; // note this is for t = 3 hour
}
else {
dP_dt = change / 4; // divide by 4 as this is the difference in time from 0 value
}
pressureAvg = pressureAvg2; // Equating the pressure at 0 to the pressure at 2 hour after 3 hours have past.
firstRound = false; // flag to let you know that this is on the past 3 hour mark. Initialized to 0 outside main loop.
}
int forecast = UNKNOWN;
if (minuteCount < 35 && firstRound) { //if time is less than 35 min on the first 3 hour interval.
forecast = UNKNOWN;
}
else if (dP_dt < (-0.25)) {
forecast = THUNDERSTORM;
}
else if (dP_dt > 0.25) {
forecast = UNSTABLE;
}
else if ((dP_dt > (-0.25)) && (dP_dt < (-0.05))) {
forecast = CLOUDY;
}
else if ((dP_dt > 0.05) && (dP_dt < 0.25)) {
forecast = SUNNY;
}
else if ((dP_dt >(-0.05)) && (dP_dt < 0.05)) {
forecast = STABLE;
}
else {
forecast = UNKNOWN;
}
// uncomment when debugging
//Serial.print(F("BME280 - Forecast at minute "));
//Serial.print(minuteCount);
//Serial.print(F(" dP/dt = "));
//Serial.print(dP_dt);
//Serial.print(F("kPa/h --> "));
//Serial.println(weather[forecast]);
return forecast;
}
#endif